|
1 引言 随着产品质量要求的不断提高,以精密加工、超精密加工、微细加工和纳米加工等为代表的精密工程越来越引起人们的关注。通常我们把被加工零件的尺寸精度和形位精度达到零点几微米,表面粗糙度低于百分之几微米的加工技术称为超精密加工技术。超精密加工技术在国防工业、信息产业和民用产品中都有着广泛的应用前景。在国防工业中,导弹陀螺仪的质量直接影响其命中率,1kg的陀螺转子,其质心偏离对称轴0.0005μm,就会引起100m的射程误差和50m的轨道误差。在宇航技术中,卫星的姿态轴承为真空无润滑轴承,其孔和外圆的圆度及圆柱度均为纳米级。卫星用的光学望远镜、电视摄像系统、红外传感器等,其光学系统中的高精度非球面透镜等都必须经过超精密车、磨、研、抛等超精密加工。此外,大型天体望远镜的透镜、红外线探测器反射镜,激光核聚变用的曲面镜等都是靠超精密加工才能制造。在信息产业中,计算机芯片、磁盘和磁头,复印机的感光鼓等都要经过超精密加工才能达到要求。民用产品中的许多产品,如隐形眼镜,就是用超精密数控车床加工而成的。
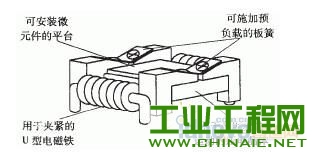 图1 微加工机器人 2 超精密加工的实现方法 目前,实现超精密加工的方法主要有:超精密切削,如超精密金刚石刀具镜面车削、镗削和铣削等;超精密磨削、研磨和抛光;超精密微细加工(电子束、离子束、激光束加工以及硅微器件的加工、LIGA技术等)。 日本的一些学者提出了利用微机器人进行超精密加工的概念,这一概念突破传统加工观念,设计出可以自由移动的微小机器人,让机器人群在工件上爬,可实现纳米级超精密加工。 机构的小型化可以节约资源和能源,并且由于零件尺寸的减小,从而提高了单位体积和重量的功能的集成度。小型化也开辟了许多新的应用领域,比如在工业上的遥操作或细胞生物领域的应用。源于微电子技术的硅微加工工艺对于机构的小型化有着重大影响,它在同一个零件上集成了机械和电子功能,非常适合于加工MEMS系统。 3 基于微机器人的超精密加工技术 目前,微机器人在超精密加工领域中的应用主要有以下几种方式:微加工机器人,宏微机器人双重驱动,机床与机器人结合,扫描隧道显微镜和原子力显微镜等。 对于微小零件的精密加工中存在的主要问题是:如何以微观精度和低成本实现微小零件的加工与装配。由于基于传统方法的加工产生驱动误差补偿和温度补偿控制需要消耗大量能量,近些年来,基于IC工艺和深层X射线技术也被成功用于复杂工艺的微机械零件的加工,但是,被加工材料局限性大,加工和维护的费用也很昂贵。而携带有各种微操作、加工、测量工具的微小机器人,不仅可以进行精密零件的加工、检验和装配,还可以合作完成一些大型机床难以完成的工序。因此,基于微机器人的超精密加工成为实现超精密加工的一种有效方式。 3.1 微加工机器人 日本静冈大学开发了一组微小机器人。每个机器人尺寸大约在1立方英寸,由压电晶体驱动,电磁铁实现在工件表面的定位,这种机器人不仅可以在水平的表面移动,还可以在立面和天棚上移动,而不需要导轨等辅助装置。它还提供了模块化设计,因而为完成不同的微观操作,可以选择不同的工具,如小锤、微检测工具和灰尘捕获探针等。在实验中,多个机器人中有一个带有减速齿轮驱动微钻,其它的由直流电机带动小齿轮驱动,可以合作进行工件表面的微孔加工,如图2。
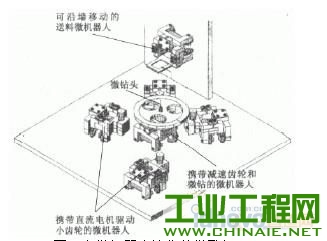 图2 多微机器人协作的微孔加工 毛利尚武等人利用“尺蠖驱动法”研制了超小型电火花加工机,可以实现直径为0.1mm的微孔的加工,如图3。青山尚之等人研制了一种微小机器人,并且利用该机器人实现了压印加工。
 图3 直接驱动的小型放电加工机 3.2 宏-微结合的驱动方式 将工业机器人与微动机器人结合在一起使用,可以制造成精密机器人,完成超精密加工及装配。这种方法的优点是可以克服工业机器人精度低的缺点,利用微动机器人提高精度;同时又可以消除微机器人运动行程小的弱点,使机器人可以进行大范围的作业。例如,在大规模集成电路装配中常使用机器人。但是常规的机器人的精度和速度往往不能满足要求。精度低多是源于驱动/伺服精度和机构的传动误差。响应时间慢是由于系统共振模态的带宽窄。为实现精确而且快速操作,日本的电气通讯大学设计了普通工业SCARA机器人与压电陶瓷驱动器结合的高精度装配机器人系统,用于IC芯片的加工,效果很好,如图4所示。系统宏动是由SCARA机器人完成的,微动是由一对精密工作台分别实现XY方向的精确运动,工作台由压电陶瓷驱动。
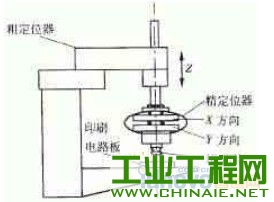 图4 日本的宏-微装配机器人 3.3 机床与微机器人技术结合 在超精密加工中使用最多的金刚石精密车床、各种精密磨床等,由于环境对于加工精度的影响很大,因而需要在高度清洁车间内进行。并且为减小误差,应尽量减小振动、传动误差,实现微进给。微机器人主要用于机床的床身与底座的振动抑制、数控与测量、微进给系统等。如用金刚石车床车削镜面磁盘,车刀的进给量为5μm,就是利用微动机器人实现的。将弹性薄膜和电致伸缩器组合成微进给机构,利用电致伸缩器的伸缩带动工作台运动,实现微量进给。王加春等利用压电陶瓷伸长和收缩,制成超精密车床溜板的主动振动控制系统,结合模糊神经网络控制方法,可以抑制溜板的振动,提高加工精度。章云等将微动机器人技术应用于新型镗床,利用压电陶瓷控制镗刀的径向进给,设计出变形镗杆,可以加工出高精度的活塞异形销孔。该机构体积小,结构简单,重量轻,制造装配容易。 3.4 扫描隧道显微镜 扫描隧道显微镜也可以看成是一种微动机器人,它一般由压电陶瓷晶体驱动,可以XYZ三个方向上实现纳米级移动,主要用于零件表面的检测,也可用于分子、原子搬迁重组,其工作原理如图5。原子力显微镜能够操作分子尺寸的粒子,在未来的纳米级零件的装配领域中具有广阔的应用前景。MIT确立了一个名为Nanowalker项目,对于微操作机器人的集成化问题进行了进一步的探索,研制多个微小的、具有多种功能的柔性微操作机器人。如图6所示,该微小机器人与扫描探针等工具结合,可具备纳米操作、三维微加工、表面检测等多种功能。
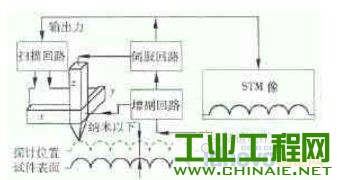 图5 STM原理机构图
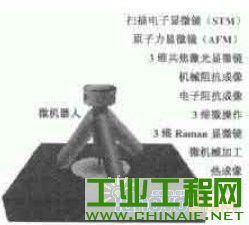 图6 多功能的柔性微机器人 3.5 未来的发展趋势 RalphHollis等提出适用于精密装配的微工厂的概念,包含了基于传感器的微操作和自动装配体系,可完成复杂MEMS系统的装配工作。Hitosh建了一个微工厂的模型。在一个工作台上,集中了微型车床、磨床、冲床、机械手、操作器等,可以实现微型零件的加工以及装配。它的特点是空间小、能耗低、重量轻,可以根据生产的需要重新构造,具有很高的柔性。 4 结论 综上所述,微机器人技术对于超精密加工、检测和装配等都具有不可替代的作用。利用微机器人技术改造传统的机床、工业机器人,可提高加工质量,降低加工成本。从单个机器人操作到多机器人协作,到桌面微工厂,微机器人技术与现代通讯技术、微加工工艺、检测技术等结合,不仅为机器人技术开拓了新的应用领域,也将在未来的先进制造领域发挥更大的作用。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

