|
3 喷枪轨迹优化 3.1 起始曲线的选择 在曲面工件的轨迹优化中,起始曲线的选择对整个曲面的涂层一致性和喷涂周期影响很大,从CAD模型中搜索最优起始曲线计算量非常巨大。提出起始曲线必须是测地线,从位置和方向两个方面给出了起始曲线的选择原则,用Gauss-Bonnet定理证明了其正确性,首先起始曲线的位置要尽可能平分被涂工件表面,这样起始曲线两侧路径的高斯曲率和相等,可以最大限度避免路径曲线的自相交,使得涂层厚度方差最小;以曲面上路径数最少的原则确定起始曲线的方向,这样可以实现喷枪转弯次数最少,喷涂周期最小。 3.2 速度优化 由式(3)、(4)知,当匀速轨迹经过曲面时,曲率的变化会导致沿轨迹方向的涂层一致性没法保证。在路径已定的前提下,采用“变速率”喷涂可以补偿表面曲率的影响,提高沿轨迹方向的涂层一致性。 如图6所示,在给定喷枪路径的两侧构建若干条子偏移(sub-offset)路径,沿子偏移路径计算涂层厚度的标准方差,优化目标为所有标准方差之和最小。
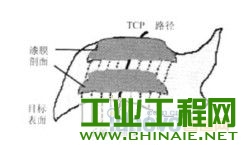 图6 速度优化 优化方法为:将给定路径分为n段长为si的线段。设在第i段路径上的喷枪速度为恒速vi,V={vi:i∈[1,n]}为速度向量。则每段路径上的喷涂时间ti=si/vi,由此可以把V的优化问题转化为T={ti:i∈[1,n]}的优化问题。子偏移路径j分为mj个长度分别为Smj,的线段,定义矩阵Dj={def:e,f∈[1,m]},其中def为喷枪在第f段的中间时,第e段沉积流量。则涂层厚度标准方差为‖(DjT- Kj)/kj‖。其中DjT代表子偏移路径j上的涂层厚度,Sj表示向量DjT所有元素之和,kj=Sj/mj,为涂层平均厚度,Kj为元素恒等于kj的mj维向量。
3.3 间距优化 在自由曲面上,表面曲率在u向和v向上均变化,所以,在路径的不同点上应有不同的行程间距。间距优化是通过临近路径的涂料沉积剖面的适当重叠来优化垂直路径方向的涂层一致性,同时,为了提高喷涂效率和涂料利用率,间距应该尽可能的宽。 如图7所示,为了确定当前路径的偏移,按照路径曲率的变化在路径上取若干个标记点。在每个标记点上作与该点的路径直交的曲面上的索引曲线。沿着索引曲线确定最优的偏移量,根据最优偏移量到当前标记点的距离确定索引曲线上的下一个标记点,新的一组标记点即可拟合得到新的偏移曲线。
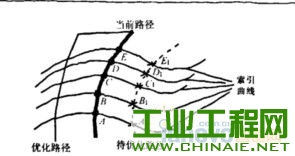 图7 间距优化 为了得到标记点间的最优索引距离,首先在各个标记点沿索引曲线切线方向用一个零高斯曲率近似曲面替代该点的工件曲面。利用式(1)~(4)最大漆膜厚度方差umax、喷涂周期和当前轨迹,可计算出间距宽度搜索范围SR=[wmin,wmax],采样间隔取wres,wmin。由喷涂周期决定,wmax由漆膜厚度的方差决定。为减少计算量,wres越大越好,但也要能准确反映间距和漆膜一致性的关系。由此可在近似曲面上建立各标记点i上的产生低于客户要求的漆膜厚度方差的可行索引宽度Fi,对于l个标记点,一次从Fi中选择一个值,组合成一个间距集I={w1,w2,…,wl},其中wi∈Fi,显然,每一个间距集代表一个不同的偏置曲线。 对于每一个间距集,设定一个惩罚集中小间距和沿当前路径的间距宽度变化的罚函数。从某种意义上说,后一个惩罚因子是用于最小化偏置曲线的测地曲率的。 产生满意喷涂结果的惩罚因子罚值的选择,由一致性、喷涂周期和计算量等的代价关系决定。由于之字路径不仅机器人末端难以跟踪,而且可能导致后续偏置曲线的自相交,所以本文主要考虑避免之字路径的出现,给沿当前路径的间距宽度变化的惩罚因子设置一个大的罚值可以实现这个目的。当然,为了简化处理,给每个标记点的索引宽度一个严格的约束即可,即只考虑所有标记点中与当前路径间距恒定的那些偏置路径。 4 机器人喷涂试验 设理想漆膜厚度qd=40μm,漆膜厚度最大允许偏差qw=10μm,喷枪喷出的圆锥形漆流底面半径R=40mm。通过平板上的喷漆试验数据得到漆膜生长速率为
 生成并优化平板上的喷枪轨迹后,得到喷漆机器人喷枪移动速率(匀速)和TCP两行程间距分别为:v=231.3mm/s,d=51.2mm。 在自主开发的喷涂机器人离线编程软件中应用本文的算法对图3所示工件的侧面进行轨迹优化,优化的路径如图8所示(黑色粗线为TCP在工件表面的投影路径);优化后的机器人关节轨迹如图9所示,纵坐标为5个关节的转动角度,横坐标路径间距表示TCP运行距离;图10为与图9对应的TCP速率;将图9和10中关节角度和速率数据通过离线编程软件下载到喷涂机器人控制器中,然后启动机器人实现对工件表面的自动喷涂。试验结果显示:机器人的运行轨迹符合喷涂要求,验证了本文方法的可行性。仿真结果如表1所示,由表1可以看出优化后的喷涂质量更佳。
 5 结论 (1)通过平面上的喷涂试验和理论推导的方法获取了曲面上的漆膜生长模型。 (2)通过扫描直接获得工件表面点云模型,采用切片技术对点云模型进行处理获取喷枪位姿。 (3)对喷检路径进行速度优化和喷枪行程间距优化,获取漆膜一致性最好的喷枪轨迹。 (4)在自主研发的喷涂机器人离线编程试验平台上验证了轨迹生成算法的可靠性,仿真结果验证了轨迹优化算法的有效性。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1