|
引言 现有的喷涂生产线上,机器人一般采用人工示教,这种方法缺陷很多,使用不够灵活。例如,由于缺少自动轨迹生成工具,喷涂专家有时需要3~5个月的时间才能完成一辆新型车身的覆盖轨迹,这严重影响了新型产品的上市速度。轨迹规划过程的自动化将显著缩短喷涂专家的编程时间。针对这个问题,Sheng等在复杂曲面分片的基础上开发了一种复杂曲面的覆盖算法,该算法可以保证曲面全部被漆膜覆盖,但是没有考虑生成漆膜厚度的一致性问题。Chen等利用平面上的喷涂模型对涂层重叠区域宽度进行优化后,生成喷枪空间路径,并在曲率变化较小的曲面上实现了沿指定空间路径的喷涂机器人喷枪轨迹的优化。Prasad等提出了一种新颖的分层次曲面分割方法,该方法能将复杂曲面分割成能用简单喷涂程序覆盖的几何和拓扑结构简单的子块,该方法实现了复杂曲面的全覆盖喷涂,但是该方法是在假设分层次分割后的子片均可以独立喷涂的前提下实现的,显然这个假设不现实,必须考虑片与片之间的影响。赵和陈等提出了自由曲面上的分片轨迹优化和基于遗传算法的轨迹优化方法,但是该方法没有提及间距优化、工件建模以及机器人的关节运动。 针对上述问题,本文提出一种基于速度和间距的轨迹优化算法以提高漆膜厚度一致性。 1 喷枪数学模型 喷枪位姿在笛卡儿坐标系中可定义为

式中P(t)=[px(t),py(t),pz(t)]T喷枪位置;O(t)=[oφ(t),oθ(t),oΦ(t)]T喷枪姿态。 当通过在平面上的喷漆试验推导漆膜累积速率函数表达式时,为了简化模型,假设喷漆时的工况参数和喷枪参数都恒定。喷枪喷出的漆流形状为圆锥体,其油漆空间分布模型如图1a所示。图中Φ为圆锥的张角,h为喷枪离平面的距离,R为平面上的喷涂半径,r是平面上一点Q离喷枪中心投影点的距离,β是Q点和喷枪的连线与喷枪中轴线的夹角。平面上的漆膜累积速率为:G=f(r,h)。喷枪离工件表面的距离一般不变,则有
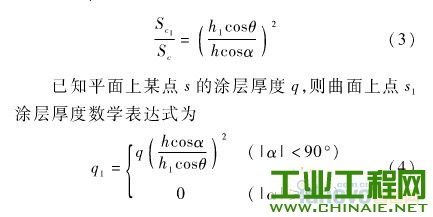
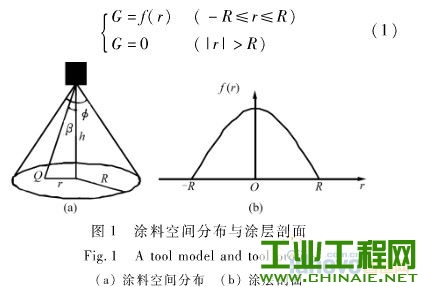 图1 涂料空间分布与涂层剖面 如图1b所示,此时G近似为二次曲线。已知漆模累积速率G后,对时间t积分,可得平面上某点的涂层厚度
 曲面P1上一点s1的漆膜生长模型如图2所示,在保持油漆总量不变的前提下,采用微分几何的面积放大定理,平面上某一点s的漆膜累积速率乘以面积放大系数得到曲面上点s1的漆膜累积速率。
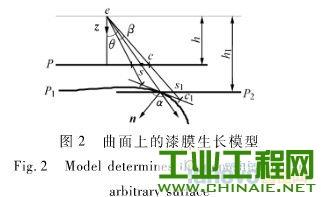 图2 曲面上的漆膜生长模型 平面P为参考平面,P2为过点s1且与P平行的平面,c为P上以s为圆心的圆,c1为c映射到过点s1的切平面上的圆,h为喷射点e到参考平面P之间的距离,h1为e到平面P2的距离,θ为直线es1与喷枪中轴线z之间的夹角,β为e到圆c的最大张角(β→0),α为s1的法向量n与es1的夹角。c1和c的面积sc1与sc的关系 2 喷枪位姿获取方法 2.1 工件表面CAD数据的获取 实物测量是逆向工程技术中的常用手段,通过特定的测量设备和方法获取工件表面的几何坐标数据。方法如下:通过扫描直接获得工件表面形状数据,该数据一般是由一系列点构成的,称为点云数据;再对点云数据进行三维重构,进而得到工件的CAD模型。经过造型后,系统CAD数据库中存放了工件的CAD模型,为喷枪轨迹生成提供工件的数据信息。 本文采用德国COM会司的ATOSⅡ三维光学扫描仪对待喷涂工件(图3)进行实物测量。测量得到的数据如图4所示,包含460087个数据点。点云模型可以由STL、TXT等多种格式输出。
 图3 待喷涂工作
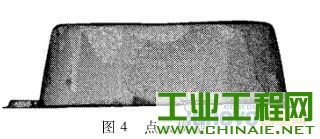 图4 点云模型 2.2 基于点云切片技术的喷枪位姿获取方法 通过扫描获取待喷涂工件的点云数据后,需要经过三维重建得到CAD模型。此过程十分繁琐、费时,且操作人员使用CAD软件系统的熟练程度和相关知识技能直接影响着模型的精度。工件表面的喷涂路径是由一系列“等距”路径线构成,若对点云数据进行均匀切片处理,可以获取等距的切片轮廓,也就确定了喷枪在工件表面的喷涂路径。因此,引入点云切片技术,直接对工件的点云数据进行研究,由计算机程序自动生成喷涂机器人的喷枪位姿路径。 具体来说步骤如下:通过设定切片方向和切片层数,对点云模型进行切片处理,得到切片多义线后对其平均采样,确定喷枪在工件表面的喷涂路径,然后估算所有采样点的法矢量,最后利用偏置算法获取喷漆机器人的喷枪运行位姿,如图5所示。
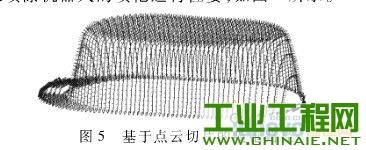 图5 基于点云切片的喷枪路径 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1