|
移动机器人技术是目前科学技术发展最活跃的领域之一,集中了传感器技术、机械工程、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表了机电一体化的最高成就。电源是各种电子电器设备工作的动力,是自动化不可或缺的重要组成部分,电源控制质量的优劣直接关系到系统的安全稳定和硬件的使用寿命。鉴于移动机器人模块众多和功能复杂等特点,相应地对电源的结构和功能提出了更高的要求。 本文介绍了一种适用于移动机器人的多功能电源。该电源不仅能很好地为控制系统供电,还具有多种特殊保护功能,保证了各模块的安全和系统的稳定运行。该电源已成功地应用于东华大学自主越障移动机器人控制系统中。 1 电源的特点 (1)为DSP运动控制卡、工控机ATX供电电源、电动机驱动器和多种传感器供电; (2)提供电池充电及充电保护检测接口和调试用外接电源接口,实现电池和外接电源的无缝切换(防止切换时主机的重启); (3)具有电池电压不足声光报警电路(电压低于44.5 V报警,高于48.5 V取消报警),并且在欠压时切断动力电池供电,采用双限比较电路防止电池欠压在临界点时电动机驱动器供电电源的抖动; (4)具有过流保护和防止供电电源反接的保护功能。 2 基本工作原理 电源工作原理如图1。电源控制板是电源的核心,具有报警、过流保护、反接保护、电池/外接电源自动切换等功能。侧面板是电源模块的操作和指示面板,电源扩展板扩展了多种设备需要的不同类型电压的接口。
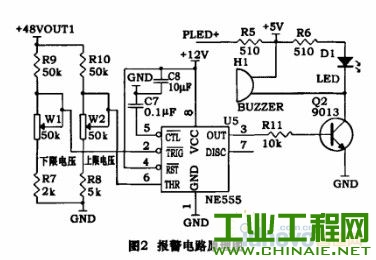
 图1电源工作原理图 3 电路设计 3.1 供电部分 考虑到越障机器人的自身特点和性能要求,选用了紧凑、高动力和低惯量的MAXON公司的6个48 V,90 w直流伺服电动机,电池和外接电源分别选用了48 V,10 AH的聚合物锂电池和48 V,800 W的稳压电源。电源给电动机驱动器提供48 V直流电压,通过一个48 V一24 V的DC—DC转换器,给工控机ATX电源和DSP运动控制卡提供24 V直流电压。另外。24 V直流电压经过三端稳压器7812和7805转换,输出稳定的12 V和5 V直流电压,供电路中的其它设备和器件使用。 3.2 报警电路 锂电池电压的高低和剩余电量的多少对机器人的安全运行、控制系统的稳定和运动控制的质量都非常重要,因此有必要对锂电池的电压进行在线检测。报警电路主要由NE555触发电路、三极管Q2(9013)构成。 具体工作原理如图2,当电池电压低于44.5 V时,触发输入2脚电压小于1/3VCC,3脚输出高电平,三极管Q2导通,驱动蜂鸣器Hl发声和发光二极管D1发光来报警;当电池电压高于48.5 V时,触发输入6脚电压高于2/3VCC,3脚输出低电平,三极管Q2关断,停止报警。通过调整可调电阻W1和W2的阻值来设定上下限电压值,这种双限比较电路的设计可以有效防止电池欠压在临界点时电动机驱动器供电电源的抖动。
 3.3 反接保护 在电源使用过程中,可能会因为误操作使电源反接从而引发不良后果,因此需要增加对外接电源和电池充放电的反接保护功能。该电源选用了对管(双二极管)封装形式的MBR20100型肖特基二极管,其最大反向峰值电压VRRM=100 V>48 V,最大连续输出电流IF(AV)=20 A。当外接电源或电池充放电正负极接反,外接电源或电池将不会工作,很好地完成了反接保护功能。 3.4 过流保护部分 为了保护电动机以及其它硬件设备和器件,在电源上专门设计了过流保护电路,该电路由两部分组成:采样电路和放大比较电路。 采样电路如图3所示,根据电动机额定电流大小和电流采样电路的特点,选取温度系数低、载流能力强的锰铜丝采样电阻R14=R15=0.05Ω,精度为1%。
 图3采用电路原理图 采样电阻总阻值R=0.025Ω。由于电动机启动电流是其额定电流的4—7倍,动作时间与电动机的容量有关,为了防止电动机启动过程中过流保护电路产生误动作,而在堵转时保护电路尽快动作,在采样电路中增加了低通滤波,把电动机启动和堵转瞬间产生的纹波电压滤除。C9=4.7μF,R13=10 kΩ,则低通滤波电路时间常数为47 ms。OUT+和OUT-分别为48 V供电电源的正负极,V1为采样电压。 电压放大比较电路如图4所示,采样电压值Vl经过运算放大器LM358放大为V2,其放大比例系数A=(R1+R2)/It2=6。电压比较器LM339具有低功耗、低失调特性,基准电压V3的大小由可调电阻W3调整。正反馈射极跟随器Q3的引入制造了一定的回差,避免了过流点附近电流很小的波动引起的不稳定现象。当过流时,V2>V3,电压比较器输出为0,切断电源的供电。
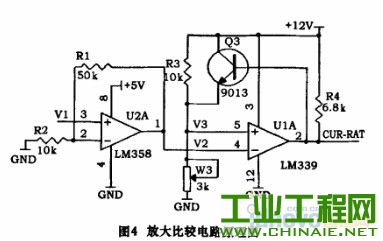 图4放大比较电路原理图 3.5 电渺外接电源切换部分 电池和外接电源是机器人很重要的两种供电来源,为了避免在实际应用中由于两种供电方式的切换而重新开关机,故给机器入电源设计厂电渺外接电源切换电路。 电池/外接电源切换电路采用继电器控制,原理如图5所示。对于功率继电器JQI和JQ2,1、2为线圈端子,4、5分别为常开、常闭接点,3为输出接点。由于加在JQl和JQ2线圈两端的电压为48 V,需分别串联一个750 Q,1 w的电阻用于分压。对于信号继电器JQ3,1、2为线圈端子,5、6分别为常开、常闭接点,3、4为输出接点。
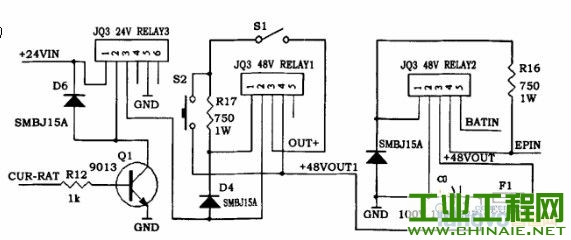 图5电池/外接电源切换原理图 正常工作时,锂电池BATIN通过JQ2常闭接点5输入供电。首先闭合s1,再按下轻触开关s2,继电器JQI线圈通电,接点3和4连通,通过接点3输出48 V供电电压OUT+,整个控制系统开始工作。当外接电源EPIN接入JQ2的常开接点4时,继电器JQ2线圈通电,输出接点3与常开接点4连通。EPIN通过常开接点4输入供电,切断了锂电池BATIN的供电。为防止电池与外接电源切换瞬间而引起主机重启,采用大电容C0续电。电容C0选用100 V,10 000 μF。而从外接电源供电切换到电池供电也非常安全方便。 当出现过流情况时,三极管Q1截止,切断继电器JQ3和JQ1的线圈供电,从而切断整个电源供电系统的供电。另外还增加了快速熔断丝F1,当电流超过10A时,能在10 ms内熔断,起到了二级保护作用。 4 结语 本文提出了一种摹于自主越障移动机器人平台的多功能电源设计,它具有集成度高、体积小等结构特点。通过一系列实验,特别是机器人进行姿态调整和越障爬坡的良好表现,验证了该电源具有安全、稳定、承载电流大等功能特点。这种电源亦可用于其它类型和用途的移动机器人控制系统中,有着广泛的应用前景。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

