|
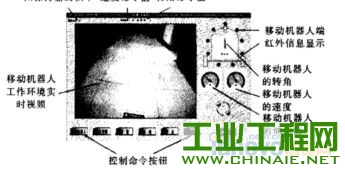
遥操作移动机器人在物理空间上可以实现人类感知能力和行为能力的延伸:在信息层次上将远端的移动机器人与操作人员连接在一个闭环回路里。实时地控制远端移动机器人的运动,以最大限度地利用远近端的设备、资源和遥操作者的智力、经验,从而实现资源最佳配置,完成特定的任务。遥操作移动机器人在很多领域具有广阔的应用前景,如星际探测、工业制造、危险环境、服务行业以及远程教育。其主要的技术问题有人机界面的设计,远程通讯的问题和移动机器人的控制方法。 基于Internet的遥操作是移动机器人的一个重要研究和应用领域,文献中的遥操作移动机器人,可以通过Web浏览器进行遥操作,其缺点是在操作人员使用的遥操作界面中,所提供的控制移动机器人的方式不多,功能单一。文献中的遥操作移动机器人,其摄像头并不是安装在移动机器人本体上,而是用于全场景监视,这样大大限制了遥操作机器人的活动场所。文献提出移动机器人基于智能体的控制方法,可使移动机器人具有一定的自主功能,但是没有对自主控制和遥操作者的控制进行统筹考虑。 针对上述存在的问题,本文设计了一种具有友好人机界面的基于合作控制的遥操作机器人系统。其特点是:人机界面显示的内容丰富,针对不同的任务,环境提供多种操作方式;通讯方式灵活、组网方便;所采用的基于人机合作的导航控制可靠、高效。 1 人机界面设计 在遥操作移动机器人系统中.实现操作者监视、控制遥操作移动机器人的功能模块是人机界面。友好的人机界面应该尽可能丰富地显示移动机器人所处的环境信息和移动机器人本身的状态信息,而且拥有合适的操作方式.让操作人员能够轻松、有效地控制移动机器人运动并完成特定的任务。 1.1 机器人端信息显示界面设计 遥操作者主要是根据显示在遥操作端的计算机上信息来控制移动机器人.为了便于遥操作者的决策和控制,要求所显示的远端移动机器人的状态信息和的环境信息尽量丰富、直观。 图1所示为本遥操作移动机器人中人机界面所显示的信息:遥操作者可以在界面的左上角看到移动机器人工作环境的实时视频信息,移动机器人的状态信息(包括速度和转角)用仪表盘的方式显示.移动机器人红外传感器的信息用可视化的方式显示界面的右上角。在界面的顶端,显示每秒所传输图像的帧数,能反应通讯的状况是否良好.还显示了直接控制时所下达给移动机器人的速度命令值和转角命令值。 图1 人机界面所显示的信息 1.2 遥控移动机器人的方式 在本遥操作移动机器人的人机界面中,提供了三种可以控制移动机器人的方法。最简单的就是使用键盘控制,通过事先设置的热键.可以方便的控制移动机器人的前进、后退和原地自转。其次是利用鼠标进行控制。本文设计了一种操作轻松,控制灵活的方法。根据在遥操作端计算机上所显示的从移动机器人端传来的视频信息.遥操作者在视频显示窗口中用鼠标指定移动机器人的运动目标点,设此点为d,根据鼠标的位置信息得到其在视频图像坐标系中的坐标记为(x,y)。如图2所示,CCD摄像机的成像模型采用tJ,孑L成像模型,像平面的位置可用KCMN平面表示;由于移动机器人是在平面上运动,所指定的目标点也在平面上.因此目标点位于世界坐标系下的ABCD平面中。记点d在摄像机坐标系下对应的成像点为q,其坐标记为(r,t);在世界坐标系下的对应点为P,其坐标记为(X,Y)。摄像机坐标系中的像平面坐标与视频图像坐标之间为比例关系,用矩阵M1表示,根据小孔成像模型,世界坐标系下平面ABCD与摄像机坐标系下像平面KLMN的关系用鸠表示。当用鼠标点出d时,其在世界坐标系下对应点P的坐标(X,Y)通过下式求得:
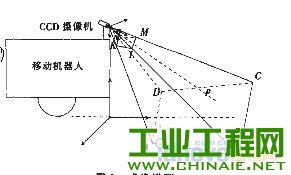 图2成像模型 操纵手柄是一种直观,容易被人接受的人机交互设备。工作在直接控制模式时.对移动机器人的行走、转弯、前进、后退的运动控制,都可以使用操纵手柄实现。当使用操纵手柄控制时,先采集到操作手柄的位置信息(X,Y),如图3所示分,然后采集操作手柄的滑块信息u。用位置信息控制移动机器人的转角.用滑块信息控制移动机器人的速度。由于从操作手柄采集到的原始信号噪声较大,因此采用了式(2)和式(3)的均值滤波,来虑除噪声。

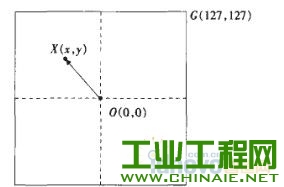 图3游戏杆命令示意图 结合移动机器人的运动能力,将线性缩放到[6,130],结合位置信息中的y值,利用方程(4)求得移动机器人的速度命令v(单位:cm/s);得到滤除噪声后的(X,Y)后,通过方程式(5)求得移动机器人的转角命令φ(单位:度),然后直接将速度命令和转角命令发送给移动机器人。
 2 远程通信方式及实现 在遥操作者和移动机器人之间的信息传输既可以采用专用的通讯设备[61,也可以借助公用通讯网络。现在,无线通信方式主要有802.11、Bluetooth和HomeRF等,无线局域网LAN802.11技术在性能、价格各方面均超过了Bluetooth、HomeRF等技术。由于Intranet的普及和移动机器人工作方式的要求.在本文设计的系统中,通信模块采用了无线局域网的802.11b技术。其性能可满足遥操作移动机器人的通信要求,具有良好的通用性,方便通信网络接口的编程实现。 IEEE 802.11是由IEEE最初制订的无线局域网标准系列。是现在使用的最多的无线传输协议,现在市场上的各种无线网卡大多都支持IEEE 802.1lb。任何局域网应用、网络操作系统或协议(如互联网协议TCP/IP)都可以在符合802.11系列规范的WLAN上运行,这也简化了编程实现,并且增强了系统的兼容性和通用性。IEEE 802.1lb的最大数据传输速率为11Mbps.也可根据信号强弱把传输率自动调整为5.5Mbps、2Mbps和1Mbps带宽。当移动机器人采集CIF格式(352x288)大小的图像时,采用JPEG压缩,带宽可以满足视频实时传输的要求(每秒传输的图像超过10帧)。在无线直线传播传输范围为室外最大300n1.室内有障碍的情况下最大100m。 无线网络的基本配备包括无线网卡及AP(Access Point)。AP就如一般有线网络的Hub,可以快速且轻易地与已有的Intranet相连,而且可以实现无缝漫游。利用已有的有线网络,在所需要的位置安放足够的AP,可以在一个很大的范围内遥操作控制移动机器人,如图4所示。另外,遥操作计算机、AP、移动机器人可以独立组网,适合任何地面平坦,移动机器人能运动的环境,如图5所示。
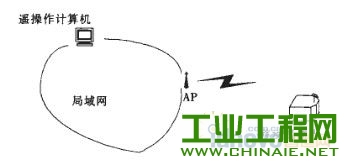 图4借助Interanet的通讯连接
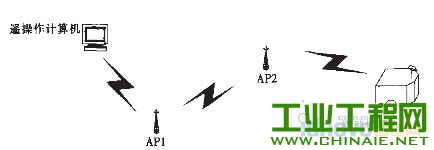 图5独立的通讯连接 3 人机合作控制 移动机器人具有多个子系统,且子系统位于不同的层次上,对于各个层次有着不同的控制要求,解决方案有分层的控制方法,基于控制信息融合的方法刚。 在遥操作移动机器人中,移动机器人工作在遥操作者的控制之下,即要使移动机器人准确地实现遥操作者的意图,又要求移动机器人具有一定的智能,能适应动态环境和处理突发事件。为了更好地协调遥操作者所发出的控制命令和移动机器人自身基于环境信息的自主行为,提出了一种如图6所示的人机合作控制方法。
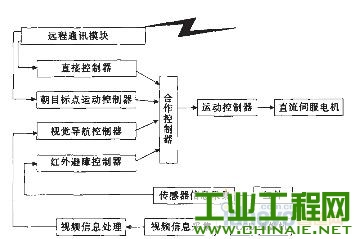 图6人机合作控制 针对不同层次上的各子系统,分别设计相应的控制器,每个控制器的输出都为直接控制移动机器人运动的速度指令和转角指令。一共设计了如下四个控制器:直接控制器,朝目标点运动控制器.视觉导航控制器和红外避障控制器。 (1)直接控制器接收遥操作者下达给移动机器人的速度命令和转角命令,以及是否对移动机器人实施强行控制,如处于强行控制模式时。其他控制器的输出将不起作用; (2)朝目标点运动控制器接收到移动机器人应到达的目标点后,结合移动机器人当时的速度和位置,求出机器人应该执行的速度和转角: (3)视觉导航控制器则利用视频信息处理模块的输出,获知当时的环境信息,如果满足视觉导航的规则,则输出控制命令: (4)红外避障控制器根据所收到的红外信息,实施最优的避障措施,发出对机器人的控制命令。 在上述四个控制器层次之上的合作控制器依据事先设定的优先级和各个控制器的输出对操作者意图和环境的匹配程度,选用相应控制器的输出作为整个控制系统的输出,并输出到运动控制器。 4 具体实现和实验 本文所用实验平台为自行研制开发的机器人AIM(Advanced Intelligent Mobile Robot).如图7所示。该移动机器人采用双轮差速驱动,前面有一无动力导向轮。移动机器人本体宽40cm,高49cm,最大长度40.5cm,装有一个彩色CCD摄像机和9个红外传感器。配有无线网卡,通过AP和遥控端相连。在软件上采用面向对象的技术,视频信息的采集、压缩、解压缩都各自封装成类,并开辟独立的线程;移动机器人的控制、网络通讯和传感器信息的处理。分别用不同的类实现。
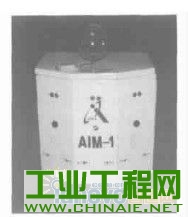 图7移动机器人AIM 在图8所示的展示大厅中,A处遥操作控制计算机、B处的AP和移动机器人C组成独立的网络系统,一个未经过训练的操作人员(参观者)在A处可以用游戏杆顺利地操作机器人绕场巡游一圈。
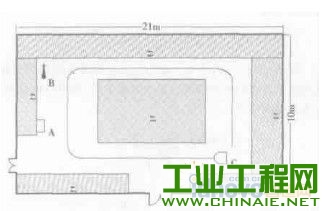 图8试验1 在图9所示的办公室环境中,整个楼道长约80m,宽2m,所进出房间门的宽度为0.85m遥操作者在A处可以用键盘控制的方式,或鼠标控制的方式,或操纵手柄控制的方式控制移动机器人B到达C处并返回到A处。 图9试验2 5 结论 本文主要从人机界面,主从端通讯,移动机器人的控制方面讨论了移动机器人的遥操作控制,提出了一种人机合作控制的遥操作机器人控制器的设计方法,通过人机合作将环境感知、任务规划、命令执行实时地结合起来。所设计的遥操作移动机器人具有开放的结构,人机界面内容丰富,操作方便,且主从端的通讯组网简单。实验证明此遥操作机器人运行平稳可靠、控制灵活.能够在危险环境下遥控作业等领域发挥作用。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1