|
0 引言 本系统由PLC、伺服控制器为核心,与伺服电机、提升机、机器人组成一套自动上下料的自动化控制系统。 1 用户要求 用户需要上下料的工件是一种直径90mm,长度1.4m的钢管,在加工机床上要对钢管两端进行加工,同时,受加工机床卡具的限制,机器人手爪的抓取位置并不在钢管的中心位置,即机器人需要进行两次装卡,而且在第二次钢管掉头装卡的时候,需要机器人调整手爪的位置后,再将钢管放人用户加工机床的卡具中。 用户的上料架存放有钢管95根,垛放方式是交叉排列码放,钢管间间隙较小,考虑机器人手爪的机械强度和其他限制,不可能利用机器人的手爪将钢管从上料架提取出来。因此,设计一台提升机通过卡钳式样的抱臂,利用气缸驱动抱臂夹紧,钩住工件钢管两端的圆孔,再利用两台伺服电机做水平方向和垂直方向的运动,将工件吊离钢管垛,运行到与机器人手爪的汇合点,最后,控制机器人将工件取走。 2 控制系统结构 2.1 硬件配置(如图1) 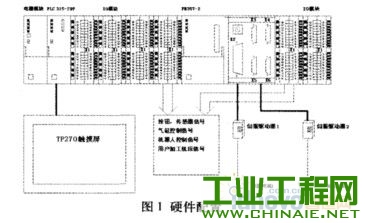 图1硬件配置 1. FLC主机选用S7_315 2DP一台。 2.4轴伺服控制模块FM357-2一台。 3.10时TP270触摸屏一台。 4. ROBOT R-2000iBl165F机器人一台。 5.伺服控制器SGDM-08ADA一台,SGDM-20ADA一台。 2.2 软件配置 根据实际情况,选用10时TP270触摸屏一台,与PLC S7_315_ 2DP采用PROFIBUS通讯方式,触摸屏的画面采用PROTOOL软件编制。TP270触摸屏作为主要的人机界面,担负着显示和控制任务。主要功用:各个机床的急停信号(有的以消息形式输出,有的以报警形式输出)显示,伺服系统的位置坐标、速度、伺服系统报警、运动指令显示、速度倍率选择、启动/停止控制,机器人工作状态的显示。 通过机器人的示教器对ROBOT R-2000iB/165F机器人进行设置和示教。 3 FM357-2的结构特点 3.1 常用功能 伺服控制FM 357-2模块通过模拟量最多可以控制4个伺服轴,通过伺服控制FM 357-2模块自带的PROFIBUS DP接口,还可以控制带有PROFIBUS DP接口的伺服控制器,例如SIMODRIVE 611-U。能够实现同步轴或者独立轴方式。 伺服控制FM 357-2模块除了自身带有12个数字开关量输入和8个数字开关量输出,还可以通过P BUS再扩展4个输入输出模块。其中,最多可以分配给16数字开关量输入,16个数字开关量输出,以及8个模拟量输入,8个模拟量输出。 NC运动程序采用G代码编写,支持子程序调用功能,有利于运动代码复用,提高代码效率和可阅读性。 通过预先估计,95根工件的运动指令和跳转指令有2000行左右,伺服控制FM357_ 2模块可以存储这些指令。 3.2 接线 伺服控制FM 357-2模块X2连接器是一个50针的D型插头,可以向带有模拟接口的功率单元提供10V信号的速度信号,使用双芯屏蔽连接到伺服电机控制器的速度指令输入端-CN1播口的5脚和6脚。FM 357-2模块还为每一个工作轴提供一个双端的使能信号,使用普通导线将这个信号接至伺服电机控制器CN1插口的伺服ON-40脚。伺服控制FM 357-2模块X2连接器其他针脚用于向步进电机控制器提供脉冲信号。 伺服控制FM 357-2模块X3、X4、X5, X6连接器分别是巧针的D型插头,用于连接增量型编码器和绝对值编码器,增量型编码器要求是5V方波信号—符合RS422标准,在信号线长度1 OM的情况下,最大传输频率为1MHz,在信号线长度35M的情况下,最大传输频率为0.5MHz,用屏蔽电缆将3组编码器脉冲输入连接到伺服电机控制器PG分频输出端。 3.3 设置方法 伺服控制FM 357-2模块的安装过程和设置内容涉及较多,安装妥当后,通过伺服控制FM 357-2模块随机光盘安装相关软件。然后或者在线、或者离线完成伺服控制FM 357-2模块的设置和运动轨迹的程序编制。以下图2、图3分别是控制器数据设置页面、回零方式设置页面。 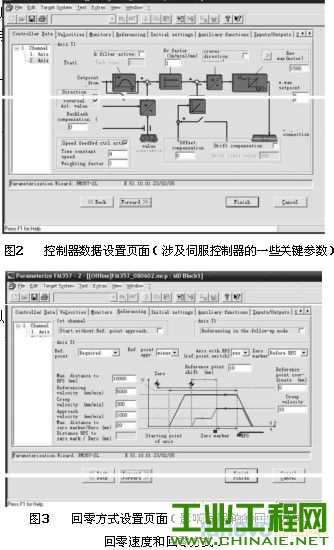 3.4 运动程序编制 2个伺服轴的运动程序的编制采用G代码的形式,按照实现的目的分类主要用到下列4种:开关量输入指令,开关量输出指令,运动指令,子循环程序指令。 *开关量输出指令:开关量采用直接输出的形式,例如: N311 $A_ OUT[10]=1; FM357模块上的P BUS总线上的8位输入/l8位输出模块的输出bit 1位被置1 N312 $A_ OUT[ 11 ]=0; FM357模块上的Pes BUS总线上的8位输入I8位输出模块的输出bit2位被置0 *开关量输入指令:利用开关量输入点完成一些动作同步功能,例如等待提升机抱臂打开的行程开关信号,伺服控制FM357-2模块指令中没有等待命令,利用伺服控制FM357-2模块指令中的循环指令实现这个功能,例如: N232 WHILE ($A_IN[17]==FALSE);WHILE循环等待$A_IN[17]开关量信号的输人 N233; N234 ENDWHILE;等待手臂打开 *运动指令:本例中使用的运动程序都是直线运动,95根钢管的定位坐标是运动程序的核心,为了调试方便和语句简洁,定位坐标使用了伺服控制FM357-2模块中的R参数。R参数的个数默认值是100个,用户可以通过修改伺服控制FM357-2模块的设置,而修改R参数个数的默认值。本例使用了4个R参数存储第一根钢管的坐标值和相邻钢管之间的XY轴方向上的步进值,具体定义绘制在TP270触摸屏的页面上,方便用户参照使用,如图4所示: 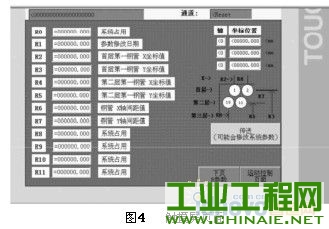 R2:首层第一根钢管的X坐标值。 R3:首层第一根钢管的Y坐标值。 R6:钢管X轴间距值。 R7:钢管Y轴间距值。 4个R参数可以由用户通过触摸屏直接输入修改,适应钢管直径和间距的小范围的变化。在实际运动程序指令中使用R参数及其运算,实现X轴Y轴的定位,实例如下: N320 G1 X=R2+R6 Y=R3 F18750; GOTO THE BAR 2 POSION 这是一个直线运动到首层第二根钢管位置的命令,运动速度命令是FI8750o *子循环程序指令:将一些常用的运动指令编制为子程序,再定义一个简单明产的名字,最后将子程序保存在伺服控制FM357-2模块的NC Programs/Subprograms中。在NC ProgramslMain Programs中的主程序就可以调用这个子程序,例如: N 1721 CLOSEARM; 这是在主程序中调用一个完成提升机抱臂关闭的子程序CLOSEARM。 4 控制手段 4.1 FLC+FM357与机器人控制方式 PLC+FM357与机器人之间的开关量控制信号采用中间继电器隔离。 出于防错和安全的考虑,设定了以下几个信号: 1.焊机原位+允许信号:利用焊机原有的焊机原位信号与一个手动允许信号在PLC内部相与运算之后,通过PLC传送给机器人,机器人在进人焊机区域时检测该信号,否则在区域外等候。 2.进入焊机区域+封锁信号:机器人在得到焊机原位十允许信号后,进人焊机工作区域,同时向PLC发出进人焊机区域+封锁信号,PLC利用这个信号封锁焊机的启动信号,防止焊机在机器人吊装工件时意外启动。 4.2 PLC+FM3}7与机器人信号交换(如图5) 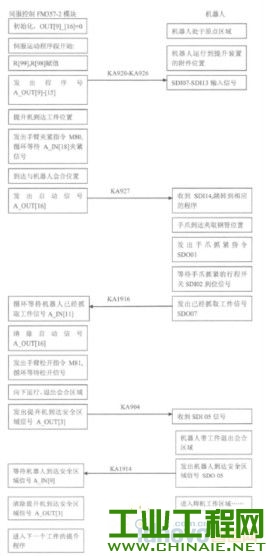 图5 PLC+FM357与机器入信号交换 5 结束语 伺服控制FM357-2模块是5300系列PLC中唯一能够实现4轴伺服控制的模块,可以实现的功能多种多样。但在配置和调试过程中涉及的问题较多,需要在实践中多加注意。 |

 /2
/2 






