|
0 引言 从诞生和发展到现在,焊接机器人的研究经历了三个阶段,即示教再现阶段、离线编程阶段和自主编程阶段。 目前,国内外大量应用弧焊机器人系统从整体上看基本都属于第一代或准二代的焊接。由于焊接路径和焊接参数是根据实际作业条件预先设置的,在焊接时缺少外部信息传感和实时调整控制功能,这类弧焊机器人对焊接作业条件的稳定性要求严格,焊接时缺乏“柔性”,表现出明显的缺点。在实际弧焊过程中,焊接条件是经常变化的,如加工和装配上的误差会造成焊缝位置和尺寸的变化,焊接过程中工件受热及散热条件改变会造成焊道变形和熔透不均。为了克服机器人焊接过程中各种不确定性因素对焊接质量的影响,提高机器人作业的智能化水平和工作的可靠性,要求弧焊机器人系统不仅能实现空间焊缝的自动实时跟踪,而且还能实现焊接参数的在线调整和焊缝质量的实时控制。由于检测电弧传感器技术复杂,加上焊接现场环境的影响,导致能实现这些功能的机器人系统价格昂贵,不易推广。 基于S3C2440与MCX314As的嵌入式焊接机器人控制器,结合S3C2440速度快、接口丰富和MCX314As数字化、易于控制的优点,采用触摸屏、摄像头采集控制信息,能有限的实现平面焊缝的实时跟踪,满足中小型企业对焊接质量的要求,易于推广。 1 硬件设计 1.1 器件简介 S3C2440是三星公司推出的基于ARM920T的嵌入式处理器,主频高达400MHz,最高可达533MHz,低功耗、高性能,片上集成指令,数据分开的16KCache、SDRAM控制器、LCD控制器、4通道DMA、3通道UART、IIC总线、IIS总线、SD主机接口、PWM定时器、看门狗、片上PLL时钟发生器、8通道10位A/D控制器和触摸屏接口以及带日历函数的实时时钟,极大地方便于系统开发,广泛地应用于PDA、便携媒体播放器、卫星导航仪以及嵌入式控制器等设备。 MCX系列运动控制器是日本NOVA公司设计的专用电路,其中的MCX314As以单个电路同时控制4个伺服系统或步进电机系统,可进行各轴独立的定位控制、速度控制,亦可在任意2轴或3轴中进行圆弧、直线、位模式插补。MCX314As能与8/16位数据总线接口,通过命令、数据和状态等寄存器实现4轴3联动的位置、速度、加速度等的运动控制和实时监控,实现圆弧、直线、位模式3种模式的轨迹插补,输出脉冲频率达到4 MHz。每轴都有伺服反馈输入端、4个输入点和8个输出点,能独立地设置为恒速、线性、非对称S曲线加/减控制、非对称梯形加/减速控制方式,并有2个32位的逻辑、实际位置计数器和状态比较寄存器,实现位置的闭环控制。另外,较MCX314增加了自动搜寻原位、输入信号滤波器、同步动作、输出脉冲32位、圆弧/直线插补脉冲范围32位、完全S曲线加/减速的非对称、手动设定模式、位置计算器的可变环形、Z相输入的实位计数器的清除、实位计算器的增减反转等功能。可见,MCX314是一片非常适合做数控系统设计的运动控制芯片,具有高精度的直线和圆弧的硬件插补功能,在一定程度上能实现对插补速度和加速度的控制,有很多功能如软件限位,硬件限位,急停等功能都专为数控系统设计,而且具有强大的位插补功能,也可以通过主控CPU通过软件插补计算出运动路径,使系统设计更加灵活。MCX314As可以广泛应用于运动控制系统。 1.2 硬件原理设计 1.2.1 CPU部分 结合运动控制芯片MCX314As的功能特点和S3C2440出色的控制和运算能力,充分利用MCU和运动控制芯片的片上资源和功能,按照系统设计的模块化和层次化思想,来构建基于S3C2440+MCX314As的焊接机器人控制系统硬件平台。 1.2.2 人机交互部分 为了满足中小型企业对焊接机器人的功能需求,符合焊接现场的技术要求,控制器采用带触摸屏的液晶显示器作为人.机交换设备,接受用户的原始数据输入和跟踪显示系统的当前状态和必要的焊接数据,并以各种形式展现给操作者,作为实施监控和操作的依据。 1.2.3 输入输出部分 摄像头作为捕捉焊缝起始点信息的传感器。MCX314As的输入点监控焊接机器人各运动轴的极限位置;输出点控制焊枪的起弧和收弧。由于MCX314As的信号是TTL电平,而要控制的焊机和电路不一定是TTL电平,而且负载也比较大,因此要进行必要的转换操作,并采用适当的光电隔离器件,防止系统接口电路与内部电路的相互干扰。控制器的主要硬件原理如图1所示。
 图1基于S3C2440控制器的硬件原理 2 软件设计 2.1 控制软件流程 软件系统的控制流程是否合理,直接影响到控制器的性能。启动控制软件,开始图像识别,在一定的范围内进行焊枪原点定位。系统可以由操作者逐步确定焊接轨迹或者由载入由CAD软件制作的电子图纸产生焊接机器人的操作命令。主程序流程图如图2所示。
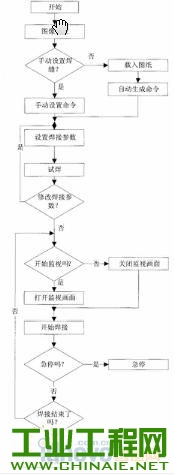 图2控制软件流程图 2.2 软件界面 友好的软件界面,可以方便操作者的使用,从而有利于焊接机器人的推广。本控制器的主界面如图3所示。
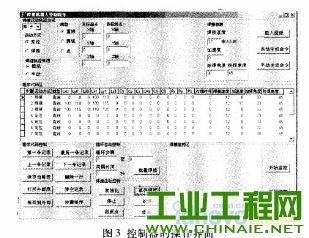 图3控制器的操作界面 3 结论 经过试验,安装基于S3C2440的焊接机器人控制器的焊接机器人焊接出来的焊缝外表美观,致密,熔宽均匀,每个焊点均处在控制器设定的位置上,说明焊接机器人的焊接质量可以达到工件要求。采用运动控制专用芯片控制焊接机器人各轴的运动,在功能上等同于采用控制系统的双CPU架构(一个CPU用于运动控制,另一个用于系统控制),可以满足焊接机器人功能要求,价格低廉,利于推广。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

