|
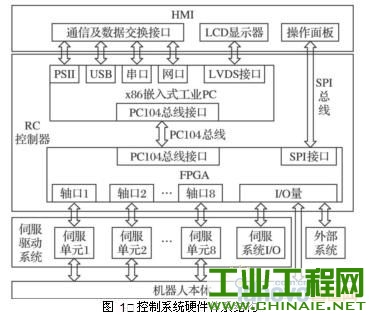
多自由度关节型工业机器人应用范围涉及到焊接、搬运、喷涂、浇铸等各方面,对于不同的应用,关节型工业机器人的自由度数量、对应的外部系统交互控制信号的需求等都各不相同。因此,其控制系统必须具有开放性、通用性,对于不同的应用,可以根据需要来选配相关的硬件设备,并提供外部系统交互信号的通路;同时能够根据需要增减、修改相应的软件功能模块,以满足不同工业机器人及其自动化系统交互控制的需求。鉴于工业PC强大的处理能力及其良好的通用性。越来越多的机器人采用工业PC作为控制系统的核心控制器。而对于不同系统之间的交互控制,系统之间的信号交换多采用开关量或现场总线通信的方式来实现。现场总线通信方式传递的信息量大,适合复杂的多机协调控制,但其实现的难度大,成本高;而采用开关量交换信号简单易行,能满足大多数工业机器人交互控制的应用需求。因此,本文选用嵌入式x86工业PC作为工业机器人控制系统的核心控制器,系统通过开关量与外部系统进行信号交换,交互信号在机器人系统内部通过共享内存的方式进行传递,从而以相对简单的方式实现工业机器人系统的交互控制。 1 工业机器人开放式控制系统结构原理 1.1 系统硬件结构 本文所设计的开放式机器人控制系统的硬件系统基于嵌入式x86工业PC实现,主要包括RC控制器、人机接口(Human Machine Interface,HMl)、伺服驱动系统等三大部分。其硬件系统的体系结构如图1所示。
图1 控制系统硬件体系结构 系统的RC控制器以“嵌人式x86工业PC+FPGA”的方式实现,嵌入式x86工业PC是整个系统的控制核心,所有的数据及信号处理均由它完成;嵌入式x86工业PC通过PCI04总线与FPGA模块进行通信;FPGA模块实现与伺服系统、外部I/O信号、操作面板等的接口功能,为工业PC与外部的各种信息和数据的交换提供通路。 伺服驱动系统由多个独立的伺服单元组成,每个独立的伺服单元由一个带标准脉冲指令接口的伺服驱动器及一个伺服电机组成,每个伺服单无对应机器人一个关节轴,关节轴数量可以根据实际需要灵活配置,系统最多可配置8个关节轴。系统共有48路输入、32路输出信号,为保证系统的町靠性,提高系统抗干扰能力,I/O信号的接口均采用光电隔离的方式。HMI包括操作面板、显示器和各种通信及数据交换接口等,可实现友好的人机交互功能,并能方便地与外部系统进行通信及数据交换。 1.2 系统软件结构 系统采用RT-Linux作为软件平台,系统软件的实时操作环境在RT-Linux操作系统上扩展而成。整个软件系统分为3层:系统层、控制层和应用层。软件系统结构如图2所示。系统层主要包括RT-Linux操作系统、设备驱动程序和RTMS实时多任务调度程序等3部分。设备驱动程序主要是满足不同的控制对象(即不同自由度的工业机器人)在使用不同的硬件配置时对不同驱动程序的要求,以实现系统的通用性。RTMS模块是自主开发的装载于RT-Linux实时内核上任务调度器,它实现对机器人控制系统的任务管理调度。控制系统将应用层和控制层的各个程序模块的任务按其不同的实时性要求划分调度优先级,以满足RTMS模块调度功能的需求。
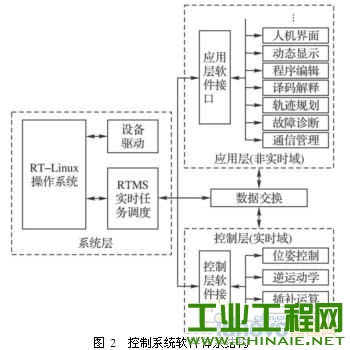 图2控制系统软件体系结构 控制层为实时域,系统的全部实时控制功能均在控制层实现。控制层软件根据控制功能的不同进行模块化设计,主要包括插补运算、逆运动学、位姿控制、PLC控制等软件模块。 应用层为非实时域,也采用模块化编程的方法进行设计,应用层功能软件模块有人机界面、动态显示、程序编辑、译码解释、轨迹规划、故障诊断、通信管理等。系统提供了对用户开放的应用层控制软件接口,具备了方便的二次开发环境,能灵活地组配不同类型的机器人控制系统和扩充系统功能,具有很好的开放性和町维护性。对于不同的工业机器人对象,其系统功能的区别和增减均在应用层实现。 2 系统交互控制机理 机器人控制系统内、外部信息的交换机制,是实现系统交互控制的关键所在。控制系统内部信息交换可以有多种方式实现,本系统中内部信息的交换通过共享内存的方式来实现。系统中内、外部开关信号的交换也是采用共享内存的方式来实现的,在共享内存中定义不同的寄存器来实现不同控制信号的传递,系统内、外部开关信号交巨机制如图3所示。
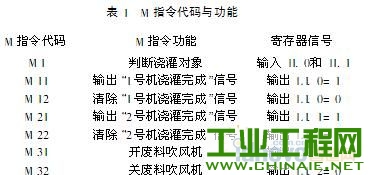
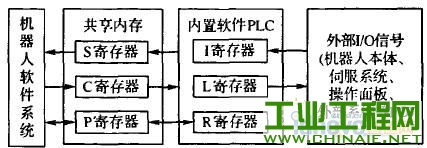 图3 系统内、外部开关信号交换机制 各寄存器功能定义如下: l寄存器为系统外部输入给PLC的开关信号,PLC程序通过读I寄存器获取外部输入信号; L寄存器为PLC输Hj给外部系统的开关信号,PLC程序通过写L寄存器输出控制信号; R寄存器为PLC内部中间寄存器,可由PLC软件任意使用; P寄存器为PLC外部参数,可由PLC程序与机器人用户任意自行定义,从而实现机器人用户与系统之间的信号交互; S寄存器为PLC输出给机器人系统内部的信号; C寄存器为机器人系统内部输出给PLC的信号。其中:S、C寄存器由数控系统与PLC事先约定好的,PLC硬件和软件都不能更改其寄存器各位的定义。 本系统控制软件中的PLC控制程序模块的主要任务是实现对系统内外部输入、输出的开关鼋信号的逻辑控制。在机器人控制系统与外部系统进行交互式控制时,所有的交互控制信号都由PLC控制程序进行处理,在PLC程序中根据控制的不同需求定义不同的M指令,每一条M指令控制一个或多个内、外部开关信号,用户进行机器人编程时,在需要实现交互控制的动作语句后而插入对应的M指令,系统通过执行M指令来读写相关寄存器的值,从而完成相关控制信号在系统内部的传递,实现本系统与外部系统的交互控制功能。 3 系统应用及其交互控制的实现 本文设计的控制系统已经成功应用于东风汽车公司某厂的三轴浇铸机器人系统的控制,实现了机器人系统与两台浇铸机系统的交互控制,系统应用实物如图4所示。 3.1 应用对象控制功能需求 如图4所示,本应用案例中机器人系统与2台浇铸机系统之间必须进行交互控制,工作时机器人运动过程如图5所示。 浇铸所用容器安装于机器人末端,机器人容器初始位置(零点)为废料箱正上方,当系统以熔炉1供料时,机器人浇灌1号浇铸机时运动过程为: a→等待→b→浇灌→c→除废料→a 机器人浇灌2号浇铸机时运动过程为: a→等待→d→浇灌→e→除废料→a 机器人末端容器从废料箱正上方水平运动到熔炉1上方暂停,等待任意浇铸机发送“准备好”信号给机器人系统;浇铸机X(1或2)准备好后,给机器人系统发送“浇铸机X准备好”信号,机器人系统检测到此信号后,从炉1内舀出液态金属,运动到浇铸机X处对其进行浇灌;浇灌完毕后,给浇铸机X发送“x号机浇灌完成”信号,浇铸机x收到此信号后开始工作,同时,机器人容器移动到废料箱下方,机器人系统清除“x号机浇灌完成”信号并暂停5s,由机器人控制系统通过外部I/0控制吹风机将容器内的废料清除,废料清除完毕后,机器人重复运动过程a,容器回到熔炉l上方,等待下一次浇铸机“准备好”信号。机器人的“等待”、“浇灌”、“除废料”等工作状态,都需要与浇铸机及其他相关辅助设备(如吹风机)进行交互控制才可实现。 同时,考虑到两台浇铸机自身工作的周期可能不同,而且可能有浇铸机故障等问题存在,机器人的浇灌过程需要有各种不同的运动过程组合。实现不M的运动过程组合,也需要机器人系统与浇铸机系统的交互控制来实现。系统正常工作过程中,两个熔炉可以根据工作中备料多少随时轮换使用,熔炉的切换要求通过机器人控制系统的操作面板上二的按键选择实现,使用不M的熔炉时,机器人运动过稃类似。 3.2 交互控制功能的实现 机器人控制系统与浇铸机系统以及外部辅助设备的交互控制,都通过PLC控制程序来实现。其中,对于机器人控制系统与浇铸机及其他外部辅助设备之间实现手动、半自动、急停、报警等互锁功能的交互信号,直接由机器人系统在PLC控制程序中进行处理;对于系统正常运行过程中的交互控制信号,则在机器人PLC控制程序中按照交互控制信号的功能定义各种不同的M指令,并在机器人运动程序中调用M指令来实现。本系统中定义的M指令及其功能如表1所示。
 M指令的功能定义在PLC程序中的exee_M()子程序中实现,定义代码如下:
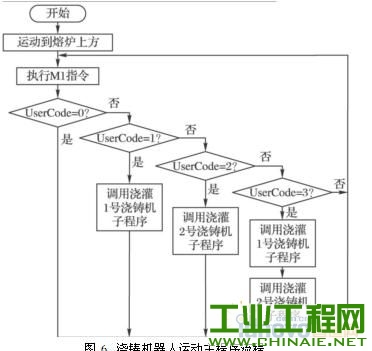
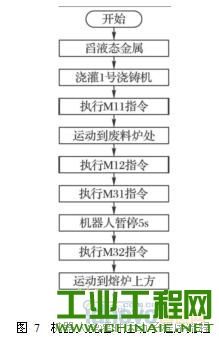
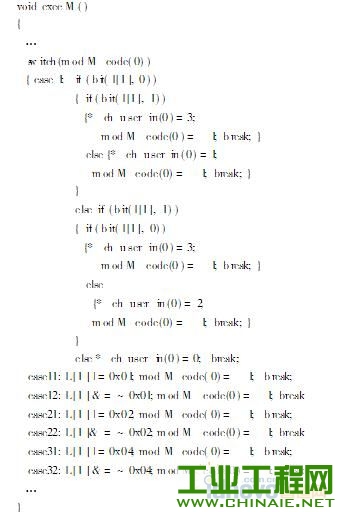 其中:Ml代码用于浇铸机系统控制机器人的动作,PLC程序先检测输入信号11.0(“浇铸机1准备好”信号)和11.1(“浇铸机2准备好”信号)的值,然后通过PLC程序中的函数*ch_Muser_in(0)来设置用户交互控制代码UserCode的值,用户的机器人运动程序中通过判别UserCode的值来决定机器人的浇灌流程。其余M代码值,均对应各个相应的输出信号,用于机器人系统控制两台浇铸机及吹风机的动作。当PLC程序处理完对应的M代码所定义的输入输出信号后,通过函数mod_MM_Mcode(O)=-1通知系统该M指令处理完毕,机器人接着执行下一条指令。 在用户的机器人运动程序中,通过在机器人运动过程中的指定位置执行对应的M指令,即可完成机器人与浇铸机的交互控制。机器人运动程序也采用模块化的方式编写,机器人对两台浇铸机的浇灌过程分别用两个子程序来实现,主程序中判断浇灌对象,调用相应的子程序,完成浇灌过程。机器人运动主程序流程如图6所示,浇灌l号浇铸机的子程序如图7所示,浇灌2号浇铸机的流程与图7类似,在此不单独说明。
4 性能指标及应用测试 根据现场应用测试,该浇铸机器人系统达到的技术指标和性能参数如下。 可控轴数:3轴(最多可扩展至8轴)。 重复定位精度:±0.8 mm。 最大负载能力:5 kg。 机器人末端最大线速度:1.5m/s。 配套浇铸机数量:2台。 单台浇铸最大周期:25 s。 现场应用浇铸原料为液态铝,根据生产工艺要求,必须保证在单台浇铸最大周期时间内完成浇铸,否则无法浇铸出合格的产品。对于不同的铸型模具,每次浇铸时液态铝用量不一样,为保证浇铸过程平稳安全.机器人运行的速度及浇铸周期也不同,在应用现场使用不同的模具对浇铸机器人控制系统进行了测试,测试结果如表2所示。
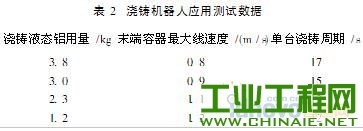 应用现场测试结果表明,该控制系统完全满足浇铸机器人系统对于小型铸铝部件的浇铸成型需求。系统从2009年底投入实际应用,至今运行状态稳定。 5 结束语 采用“嵌入式工业Pc+FPGA”的方案作为控制系统通用性、开放式硬件平台,以RT—Linux操作系统为软件平台,采用模块化编程的方法,实现了机器人控制系统软件功能。系统通过开关量与外部系统进行信号交换,并以共享内存的方式将交互信号在系统内部传送,交互控制机制简单町行,能满足各种不通应用场合的交互控制需求。系统已经成功应用于东风汽车公司某厂的三轴浇铸机器人控制系统中,实现了灵活的交互控制功能,经过生产实践证明,该控制系统具有较高的可靠性、实时性和开放性,各项性能指标均符合实际应用需求,具有很好的应用前景。
|

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1