|
0 引言 传统的水暖卫浴产品抛光通常由手工完成,这样就造成了生产效率比较低以及产品表面质量难以保证的问题,同时也提高了生产成本。从精益生产的理念分析,作为一种新兴的制造技术,柔性制造在水暖卫浴产品生产中占有重要的地位。所谓柔性生产即通过系统结构、人员组织、运作方式和市场营销等方面的改革,使生产系统能对市场需求变化作出快速的适应,同时消除冗余无用的损耗,力求企业获得更大的效益。计算机控制及自动化生产技术是柔性生产的技术基础。例如柔性制造系统是以统一的信息控制系统和自动物料储运系统连接起来的一组加工设备,能在不停机的情况下实现多品种工件的加工,并具有一定管理功能心。介绍由瑞士ABB公司制造的IRC5机器人控制系统及磨抛系统与磨抛工艺有机结合构成的一种柔性加工系统。 1 主要开发思路 目前国内外复杂几何形状工件(如卫浴水龙头、航空发动机叶片、人体关节等)的磨削抛光工艺一般只能采用手工作业,不仅存在加工效率低、产品一致性差、精度不高、生产人员工作环境恶劣等弊端。同时,管理成本较高。课题研究开发的工业机器人自动磨抛系统(用于砂抛)主要由六自由度工业机器人(机械手)、磨削抛光设备、力反馈控制系统、离线编程软件、校准装置、在线控制系统等组成,覆盖了磨削抛光工艺的各个方面,先进的技术使系统能够处理各种复杂形状的工件,并且保证了工件的加工质量和产品的一致性。 工业机器人自动磨抛中心集离线编程、生产、检测等于一体,可以极大地改善工人的工作条件、提高生产效率和成品率。同时利用安装在磨削抛光设备上的力反馈自适应系统,实时地反馈加工时的受力状态,使系统能够实现均匀磨削,从而提高了被加工表面质量的一致性,实现复杂形状工件磨削抛光的自动化。 2 工业机器人自动磨抛系统基本构成 工业机器人自动磨抛系统(用于砂抛)硬件部分主要由4台图1上业机器人自动磨抛系统组成抛光机、1套抛光机控制柜、1台ABB公司IRB 4400—60/1.96六自由度工业机器人、1套机器人控制器、1套工件台5个部分组成(如图1所示)。
 图1上业机器人自动磨抛系统组成 3 工业机器人自动磨抛控制系统 控制系统的工作原理:通过HMI输入需要控制的参量,同时显示必要的数据,PLC、变频器、机器人依靠DeviceNet现场总线完成控制过程的数据交换并按照固定的数学模型完成砂抛动作;I/O完成对系统中的开关量等的输入和输出,实现控制和状态检测。 3.1 DeviceNet现场总线 DeviceNet是由美国Rockwell公司在CAN基础上推出的一种低成本的通信协议,通常采用一种低端网络系统。将基本工业设备连接到网络,从而避免了昂贵和繁琐的硬接线。DevieeNet网络最大可以操作64个节点,可用的通讯波特率分别为125kbps、250kbps和500kbps 3种。设备可由DeviceNet总线供电(最大总电流8A)或使用独立电源供电。DevieeNet协议制定规范来确定每个DeviceNet节点数据帧标识的分配,其中对于应用极为普遍的M/S网络,DeviceNet协议制定了一套预先定义好的CAN数据帧的标识分配方案。 3.2 通讯模式选择 机器人在磨抛过程中必定要与磨抛机、工件台相互配合,各个子系统间的通讯都是依靠DeviceNet系统总线进行。系统中采用DeviceNet协议的作用是在工业机器人及磨抛机控制器之间进行数据交换。因此,这种通信是基于面向连接的(点对点或多点传送)通讯模型建立。这样,DeviceNet既可以工作在主从模式,也可以工作在多主模式。 在设置机器人与DeviceNet通信的方式上,系统提供了3种方式:VIRTUAL、SN—MA跚mR、SN—SIAVE。在VIRTUAL方式下接口板也使用虚拟,虚拟表示为系统自带的总线和Io单元,并没有使用系统的扩展IO板,如D652板。系统将提供虚拟的IO单元的(输入和输出)映射区间为[0,511],也就是说有512个IO单元。但是,在该模式下各子系统无法与机器人正常通信。该模式提供试验所用。 通常机器人与总线(Devicenet)2E作模式要选择SN—SLAVE。在这种模式下测出10单元数,输入单元区间[0,63],输出单元区间[0,63],也就是说输入输出各提供了64个单元。对于机器人说,输入相对机器人而言是机器人发送信号给PLC,输出相对机器人而言是PLC发送信号给机器人。 3.3 EIO单元配置 机器人系统主要I/O单元配置如表1和表2所示。

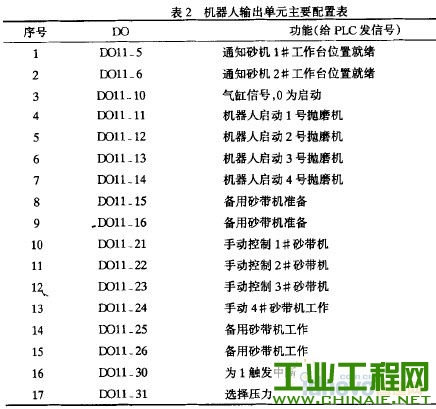 整个磨抛系统将由以上IO信号控制,如果没有正确的IO信号,磨抛系统无法正常工作。因此IO信号的确定在系统开发的过程中将起到极其重要的作用。 4 RAPID编程与系统软件控制 4.1 RAPID语言 通常RAPID应用程序是由3个不同部分组成:一个主程序;几个子程序,或称为例行程序;程序数据。除此之外,程序存储器还包含系统模块。USER模块和BASE模块在机器人冷启动后自动生成。 机器人控制程序包括一系列指令,其中描述了机器人工作的各种指令,如控制机器臂移动或者一个设置输出等。RAPID指令一般都有相关参数的定义,并在指令中有一个特定的位置设置。 4.2 磨抛系统与示教编程 整个磨抛系统程序由4部分组成:系统相关坐标及变量定义;系统初始化;磨抛控制;系统报警复位。各部分间的通信由预先定义好的输入输出信号控制。 各部分间指令主要通过在线示教编程得到。 示教就是通过手动操作机器人的示教器从而控制机器人在规定工艺运动轨迹上运行,在运动过程中取得轨迹上经过的每点坐标。示教取坐标的过程与磨抛工艺水平高低密切相关。示教取得的轨迹坐标点的多少将是影响工艺水平的重要因素。实施示教是通过操控示教器控制机器人,因此,必须先熟练掌握机器人各轴的移动。 控制机器人各轴移动首先必须对轴的顺序进行识别。以ABB IRB 4400机器人为例,它是一台6轴机器人。其中1~3轴从控制按钮的方向来分,水平方向是Nol轴;垂直方向是N02轴;旋转方向N03轴。4--6轴从按钮的方向来分:水平方向是N04轴;垂直方向是N05轴;旋转方向是N06轴。 在线示教取得磨抛轨迹坐标点的数量将决定自动磨抛系统的工艺水平。在自动磨抛系统中基础坐标有:工件坐标与工具坐标。工具坐标和工件坐标必须在示教磨抛轨迹坐标前准确设定好。从而保证后续示教工作顺利进行。 获取工具坐标需要通过辅助工装配合。工具坐标分别有机器臂中心点。确认了机器臂中心点后改变机器臂中心点的2轴方向的值便可得到其他工具坐标点(由于x轴和y轴坐标固定不变)。同样得到的工具坐标还有工件左中心点,工件右中心点,工件上中心点和工件下中心点。 工件坐标指取在磨抛机砂轮上的坐标。系统有4台带砂轮抛光机,与辅助工装配合取得4个工件坐标。以上所述示教所取磨抛轨迹坐标Rapid指令相结合生成控制机器人移动指令从而实现整个自动磨抛系统工艺。取得工件与工具坐标后,便可开展取磨抛轨迹坐标点的工作。这个过程主要分为以下5个步骤: (1)使机器人复位,磨抛机复位,工件放人工件台。 (2)打开示教器上程序编辑器,在编辑器中新建一条Move指令如:Morel,Movej等,控制机器臂移动到工件台夹起工件,点击示教器上“修改位置”按键,从而得到与工件台上工件的坐标相结合的一条指令。 (3)将机器臂移动到抛光机上,结合工艺指定目标位置。点击示教器上“修改位置”按键,从而得到与磨抛轨迹坐标点相结合的一条指令。 (4)调低机器臂移动速度,重复第(2)步,进行不同轨迹点的示教,并取得磨抛指令。 (5)周而复始,通过控制机器臂不断调整坐标位置,从而取得最精确的磨抛轨迹坐标以及生成一系列工件磨抛指令集。 5 结束语 提出了一种基于DeviceNet网络通过主从通讯控制,以1台ABB IRB 4400工业机器人与4台砂轮抛光机构成的工业机器人自动磨抛系统。由于水暖卫浴产品表面抛光质量要求较高,因此,示教取得抛光轨迹坐标是一个非常重要的工作。由于抛光件的多样性,造成针对不同的抛光件需开发不同的磨抛程序。通过实验证明,系统运行正常,由工业机器人磨抛系统加工出的产品符合工艺质量要求。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

