|
0 引言 在经济发展中,数控机床已成为制造业领域的基本设备。目前,中国的数控机床越来越多,但产品自动化水平却相当低。经济数控机床的质量在提高,改进数控机床的质量也在提高,智能移动机器人服务的数控机床组由不少于两台的数控机床组成,这为移动智能机器人的发展提供了机遇。 大多数国内公司和研究部门侧重干研究服务单台数控机床的自动换刀装置及钳位操作器,它强调智能、高速及高精度,对经济成本和实用性的考虑较少。但是对国内中小型制造企业来说,控制经济成本及实用性才是最重要的。有些研究更关注机器人的配置和灵活性,对数控机床和机器人之间的通信协同操作处理较少。目前中国还没有关于智能移动机器人服务数控机床组及完成多个任务这方面的报道。国内中小型翩造企业对这类机器人需求越来越多忙。本文提出了设计服务数控机床组的智能机器人的新理论。为使很多中小型制造企业节省费用,机器人与数控机床组的实时通信技术由标准件和简单的机械结构组成。除此之外,通过软件集成,实现了机器人的可靠性和稳定性。 1 机器人结构设计 机器人包括执行机构和运动平台。执行机构采用双四杆机构联动和柔性夹持器,可实现无运动盲区。执行机构如图1所示。
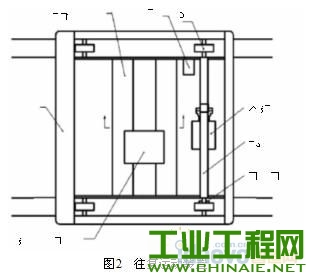
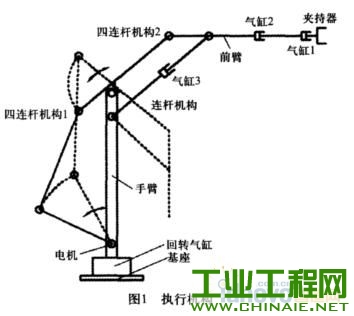 机器人机构由手臂、前臂、夹持器和基础组成。手臂和前臂由双四杆机构联系起来,可以完成动力传输。为前臂提供动力的电机靠近基础安装,因此执行机构重心较低。这样可以最大程度上使机器保持平衡。四连杆机构2用于调整气缸3的连杆机构长度,所以在垂直平面具有旋转角。这种机构能最大程度上拓宽夹具的作业范围。回转式气缸可以使执行机构在水平面内旋转,所以夹持器可实现无盲区运动。夹持器能够利用灵活机制,采取多种形式的工件和刀具,改进机器人的性能,扩大应用领域。 运动平台做往复直线运动,如图2所示。平台包括车体、导轨、车轮、旋转编码器、电机、电气控制系统、驱动控制器和副定位器。车体安放在导轨上,由框架结构组成。当车体在轨道上高速运行时,轨道外侧的轮缘可防止车体脱轨。行星齿轮电力马达安装在主传动轴上。车轮和传动轴采用活套张紧辊连接,位于旋转编码器上。活套张紧辊必须安装在低速轮上。驱动控制器和电气控制系统安装在车体内,由钢丝绳连接。
2 基于ZIGBEE.GPRS和3G模块的通信技术 机器人与数控机床间的无线通讯采用Zigbee。拓扑结构如图3所示。
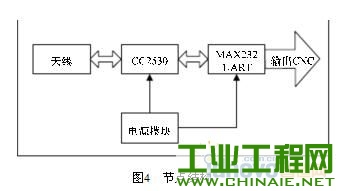
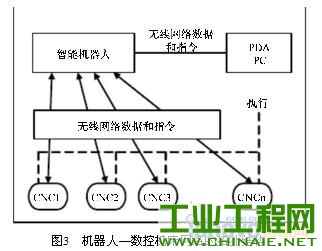 ZigBee(IEEE 802.15.4标准)是一种新兴的无线网络技术,它具有短源距、低复杂性、低功耗、低数据率和低成本的特点。因为ZigBee技术的抗干扰能力强,本文首先将其引入机器人和数控机床之间的通讯中。利用GPRS和3G模块可实现工作空间中的无线通信。中部节点采用ARM处理器和存储器,具有强大的处理能力和存储空间,以便需要的时候提供给数控机床的程序。机器人将数控程序传输给数控机床,对程序进行调试。当调试结束,调试结果会由机器人,而不是数控机床直接传输给监控器(个人电脑或个人数字设备)。该系统采用星型拓扑结构。数控机床组和监控电脑或个人数字设备是外围节点,机器人为中部节点。具体框架如图4所示。
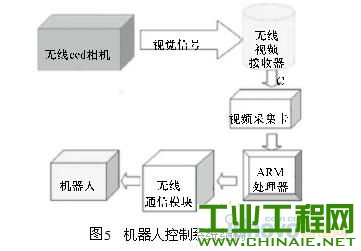
 3 机器人视觉系统的智能控制技术 机器人视觉系统采用先进的无线传感器模块、无线通信模块、无线ccd相机。机器人利用无线ccd相机和无线传感器分析夹具作业姿态及数控机床状态,然后将这些视频信号传输给无线传感器。接收这些处理过的视频信号后,无线传感器将其传送给ARM处理器。ARM处理器将根据这些信号作出决策,井通过无线通信模块将决策传输给机器人。闭环控制系统将按上文所述创建,确保机器人在运动中的精确定位和导航。该系统结构如图5所示。
 该技术具有以下优点: 1)应用嵌入技术和视觉技术使控制系统成为融合系统; 2)视觉系统实现精确定位和导航(公差小于0.05毫米); 3)视觉系统智能判断数控机床的状况。 4 结论 智能移动机器人可以完成数控机床的多种任务,这与中国制造企业的现状相一致。机器人是成功的自动换刀装置,也是高效钳位机械手。更重要的是,它能够服务不少于三台数控机床的数控机床组,而不仅仅是一台机床。机器人实现了中国制造企业的自动化。应用结果表明,机器人——数控机床系统能够为企业带来如提高生产率,降低人力成本,降低产品成本等的诸多效益。因此,机器人系统的应用能给企业带来众多的经济效益。该技术理论在现代化制造中具有十分重要的现实意义和广阔的应用前景。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


