|
1 引言 随着机器人技术进步及其在各个领域的广泛应用,许多发达国家均把机器人技术的开发、研究列人国家高新技术发展计划。各国高等院校也相应地开设有关课程,培养机器人开发、设计、生产、维护等方面的人才。而作为机械工程及自动化专业的技术人才则更迫切需要掌握这一先进技术。为了能更好地加强技术人员对工业机器人的技能实践与技术掌握,需要开放性强的设备来满足要求。本文阐述了所开发的一种基于“工业PC+DSP运动控制器”分布式控制结构的开放式5R工业机器人系统。 2 5R工业机器人本体结构 2.1 5R工业机器人操作机结构 如图1所示,为设计的5R工业机器人结构简图。其5个自由度分别为:机身旋转关节J1、大臂旋转关节J2(肩关节)、小臂旋转关节J3(肘关节)和手腕仰俯J4(肩动关),手腕旋转运动关节J5(腕关节)。总体设计思想为:选用伺服电桃(带制动器)驭动,通过同步带、轮系等机械机构进行间接传动,腕关节上计有装配手爪用法兰,通过不断地更换手爪来实现不同的作业任务。 2.1.1 机身设计 如图1中结构,机器人机身部分的旋转运动由交流伺服电机驱动而实现,其传动过程为:伺服电机运转带动装在电机输出=轴上同步步齿形带轮一起旋转,经同步齿形带传输到机身的转动轴上,从而驱动装在轴上的平台运转,而平台又与大臂旋转关节本休相联,则间接地实现锻个机身的运动驱动。转动轴上的轴承选用角接触球轴承,具有能同时受径向载荷和单向轴向载荷的特点,成对使用可以满足机身结构的承载需要。 2.1.2 手臂设计 臂部的作用是支承腕部和手部,并改变手部在空间的位置,臂部的结构形式必须根据机器人的运动形式、抓取重量、动作自由度、运动精度等因素来确定。同时,设计时必须考虑到手臂的受力情况,电机及导向装置的布置以及与手腕的连接形式等因素。大臂是联接机身和小臂的主体,设计中考虑到驱动电机的布置合理性,将大臂结构设计成为可拆型,即大臂的一侧面板可以拆卸,安装只需用螺钉将侧面板固定到大臂侧面上即可,这样有利于电机的安装和拆卸。大臂内部安装有2个电机,分别实现大臂、小臂的驱动。如图2所示,为大臂的结构示意。小臂联接大臂和腕部,在设计中考虑到减轻小臂重量,所以设计时挖去中间部分实体,同时照顾到电机在小臂内部的安装位置。这里尉—个联接板将电机连接在小臂本体的底部,在侧面有电机输出轴安装位置(孔)。为了防尘,在小臂外部还加了防尘盖。其中小臂的电机是为腕部提供动力源,而小臂的动力源由安装在大臂内的电机提供。大臂、小臂驱动电机的转速相对于关节的运动速度高很多,所以必须进行减速。在这里考虑到结构的紧凑性问题,通过将主动轮和从动轮的大小设置不同来达到减速的目的,相对而言精度不是很高。另外,设计中还考虑到了传动带的张紧措施,如图2所示中张紧轮。 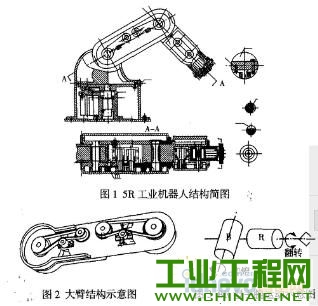 2.1.3 手腕设计 工业机器人的腕部是联接手部和臂部的部件,起支承手部的作用,手腕上的自由度主要是实现所期望的姿态。我们所设计的手腕有两个自由度,一个是俯仰,一个是翻转,属于BR型手腕,其运动示意图如图3所示。其中俯仰自由度是由安装在小臂上的电机驱动,经同步带传动到安装在腕部的轴上,则带动腕部进行俯仰;翻转自由度是由安装在腕内部的伺服电机来直接驱动。该结构的手腕具有传动简单、结构紧凑和轻巧的特点。 2.2 5R工业机器人参数 如表1所示,为设计的5R工业机器人有关参数。 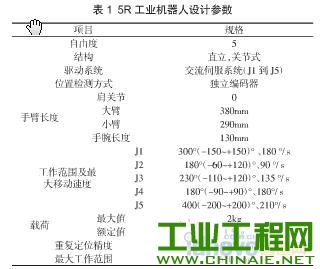 3 5R工业机器人开放式控制系统 3.1 DSP运动控制器MCT8000F8简介 深圳摩信科技公司MCT8000F8运动控制器是基于网络技术的开放式结构高性能DSP8轴运动控制器,包括主控制板、接口板以及控制软件等,具有开放式、高速、高精度、网际在线控制、多轴同步控制、可重构性、高集成度、高可靠性和安全性等特点,是新一代开放式结构高性能可编程运动控制器。各个关节可以完成独立伺服控制,能够实现线性插补、二轴圆弧插补控制M。 3.2 机器人控制系统结构及工作原理 机器人伺服系统框图,如图4所示。主机选用威达工控机(2台:管理级、控制级),伺服级采用深圳摩信公司生产的8轴运动控制器MCT8000F8,手持式示教盒是自行设计的单片机设备,采用MCS-5l系列芯片,点阵字符型液晶显示。 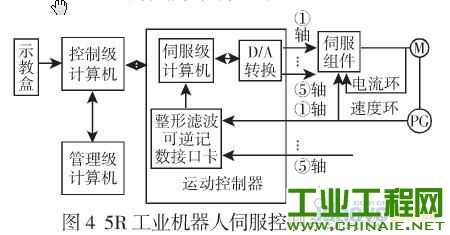 伺服系统由基于DSP的运动控制器、伺服驱动器、伺服电动机及光电编码器组成。伺旧睬统包含三个反馈子系统:位置环、速度环、电流环阳,其工作原理如下:执行元件为交流伺服电动机,伺服驱动器为速度、电流闭环的功率驱动元件,光电编码器担负着检测伺服电机速度和位置的任务。伺服级计算机的主要功能是接受控制级发出的各种运动控制命令,根据位置给定信号及光电编码器的位置反馈信号,分时完成各关节的误差计算、控制算法及D/A转换、将速度给定信号加至伺服组件的控制端子,完成对各关节的位置伺服控制。管理级计算机主要完成离线编程、运动仿真、与控制级通讯、作业管理等功能;控制级计算机主要完成用户程序编辑、用户程序解释,向下位机运动控制器发机器人运动指令、实时监控、输^输出控制(如打印)等;示教盒通过控制级计算机可以获得机器^.伺服系统中的数据(脉冲、转角),并用于实现对机器人的示教及控制。 3.3 控制系统工作流程 如图5所示,为机器人控制系统中的数据流图,数据流有三种流向:(1)示教盒通过控制级计算机获得机器人伺服系统中的数据(脉冲、转角),并用于控制级计算机控制软件中实现对机器人的示教及控制。(2)管理级训算机与控制级计算衫进行通讯,进行数据传输及实现管理工作,控制级计算机获得控制程序或控制数据对机器人进行控制。(3)控制级计算机直接获得机错人伺服系统中的数据进行控制,如图6所示,为控制系统工作流程图。 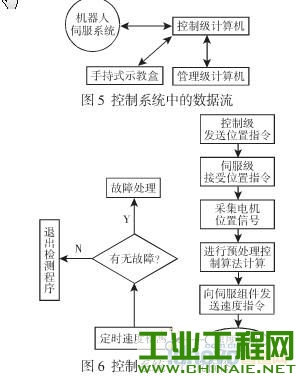 实验结果证明,采用“工业PC+I15P运动控制器”的分布式控制结构可以充分利用DSP运算的高速性,满足机器入控制的实时需求.实现较高的运动控制性能。 4 5R工业机器人控制软件 4.1 管理级主模块 管理级主模块具有离线编程、运动仿直、资料杳询及故障诊断等功能,其结构如图7所示:离线编程模块建立机器人及其工作环境的模型,利用规划算法,通过对模型对象的操作,编制各种运动控制,在离线情况卜生成工作程序;运动仿真模块可预先模拟离线编程的运行结果,便于检查机器人运动轨迹及路径优化;资料查询模块叮以查阅工似录生产数量、班次等信息,并提供打印输出、存档功能;故障诊断模块可以实时故障诊断,以代码形式显示出故障类型,并为技术人员排除故障提供帮助信息。 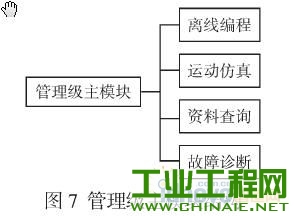 4.2控制级主模块 控制级主校块包括:(1)通讯模块。实现与管理级计算机、示教盒的通讯功能:(2)运行模块,包括复位、自动运行、示教操作三种工作状态及功能:(3)作业词度模块,包括凋用、修改‘编写作业程序等;(4)监控模块。实时显示故障检测的代码,并提供帮助信息。 复位功能使得机器人停棚寸或动作异常时,通过特定的操作或自动的方式,使机器人回到作业原点。机器人在作业原点,机构的各运动副所受力矩最小。它确定了机器人待七碰安全位姿。在正常停机时。机器人会自动回到作业原点,而当机器人动作出现异常时,通过操作即可实现机器人安全复位,以便重新使机器人进行正常作业。 系统提供了阵种示教方法,即在线示教和离线示教。在线示教方法即“下位机+示教盒”的示教方法:示教盒和下位机操作界面上的手动操作开关分别对应着机器人的各种动作和功能。通过这些开关的切换,使机器人各自由度的关节能自由地动作。通过高、中、低速、点动等速度档次的选择,对机器人进行大致的定位和精确的位置微调,从而实现远距离导引示教机器人完成顶定的动作,在期望的运动轨迹上上关键特征点处逐一定位,并存储期望的运动轨迹上机器人的位置、姿态参数.离线示教力一法是在计算机上建立机器人作业环境的模型.再在这个模型的基础上生成示教数据的一种应用人工智能的示教方法;进行示教时使用计算机仿真的图示方法分析机器人与作业膜型的位置关系,也可以通过特定指令指定机器人的运动位置;而且,在该方式下,通过使用存储于计算机内的模型.不要求机器人产生实际运动便能在示教结果的基础上对机器人的运动进行仿真。从而确定示教内容是否恰当。 通过示教,机器人获得了再现时的各种信息切换到机器人再现工作摸式,接通伺服电源.启动即可自动完成再现功能。 4.3 机器人仿真系统 机器人仿真系统作为机器人设计研究的安全可靠、灵活方便的工具,发挥着重要的作用,它可以应用于机器人的许多方面。机器人仿真系统的开发,需要强有力的开发工具,OpenGl就是众多开发工具中非常实用方便的一种,被公认为是高性能图形和交互式视景处里标准,广泛应用于可视化,动画及虚扛奴实等技术领域。利用OpenGl提供的库函数及相应功能开发了机器人的仿真系统,可以实现以下功能:显示机器人的静态二维模型及环境模型,可动态观察5个关节正、反向的运动情况:根据对系统的结构参数、可控参数等设置,对机器人的轨迹规划进行动态仿真,在仿真过程中可以通过弹出式菜单对动态过程进行交互操作;利用鼠标对坐标系进行任意位置的旋转;通过动态演示沙曲确定机器人运动学最优解。如图8所示,为机器人OpenGl仿真流程图。如图9所示,为机器人三维运动仿真。  5 结束语 所开发的开放式5R工业机器人系统具有以下特点:采用“工业PC+DSP运动控制器”分劝试二级控制结构,增加了系统的开放性、快速性及可靠性;良好的通用性,该机器人具有较好的产业化、商品化前景:控制软件采用C++编程,通过调用底层函数可以对硬件进行直手剑澡作,可视化乐霓侧共良好的人机交互。该机器人可作为《机器人工学》、《机电体化系统设计》等课程的教学实验设备,将抽象的理论学习给于直观的实践中,促进对工业机器人技术的掌握与应用。也可作为通用机器人进行产业化生产,用于各种工业现场。
| 






 /1
/1 


