|
0 引言 为近场声全息或声阵列技术中传声器测量点提供三维可编程自动扫描功能,提高近场声全息中的工作效率。为发动机台架试验、消声室内整车等静止辐射声源提供声源识别与故障诊断的测量工具。 1 系统结构 1.1需求功能 (1) 可读取多种软件格式文件包括:bdf文件、dat文件、fem文件、inp文件、Excel文件及数控行业通用的G代码文件。 (2) 可进行三维内多点位置扫描,弧、线、圆等轨迹的匀速扫描。 (3) 导入背景图片,并可自由调整大小,并将当前视图存为图片。 (4) 可切换显示不同视图(XY、YZ、XZ)内的点,图形。 (5) 可进行自动、单步测试,进行暂停、停止、从选择点开始等功能。 (6) 绕过障碍物扫描功能。 1.2 系统设计 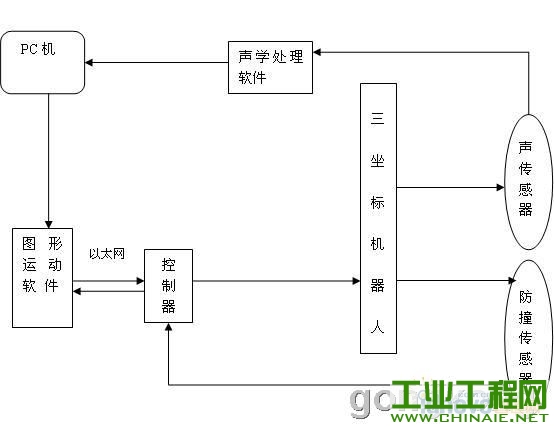 硬件配置 控制系统采用Trio 309控制器,使用网络连接通信控制运动。伺服驱动器采用采用MOTEC伺服电机,X轴使用两套伺服电机,主伺服同步驱动从伺服运动。机械部分采用MOTEC三坐标大行程平台,软件部分由本公司独立开发。 1.3设备三维图 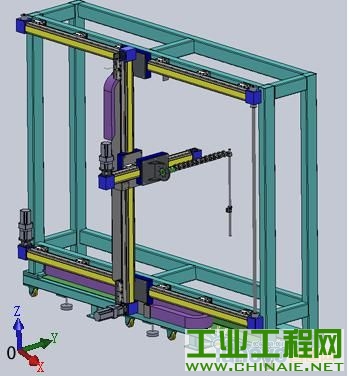 2 软件功能 (1) 可读取多种软件格式文件包括:bdf文件、dat文件、fem文件、inp文件、Excel文件及数控行业通用的G代码文件,本软件文件格式为rot。 (2) 图形绘制编辑功能,可绘制点、线、3点弧、起终点半径弧、3点圆、圆心半径圆等;通过图形属性修改相关特性,也可选中图形进行拉伸、移动等操作;支持复制、粘贴、删除、剪切、查找等操作。 (3) 选择捕捉功能,可单选、多选、框选、全选等图形记录,能对点、线或弧两端点及中点等进行自动捕捉。 (4) 方便的图形查看功能,利用鼠标滚轮自由缩放、框选放大、适应窗口、适应图形、路径显示、导航查看,并且视图左面及上面有刻度显示及鼠标移动的坐标显示。 (5) 层操作功能,根据用户需要可将绘制图形设置在不同的层上,进行层显示、层偏移等操作;不同的层可设置不同颜色区分。 (6) 运动控制功能,可进行PTP(点到点)运动,手动寸动、手动连动,扫描运动等。 (7) 文本编辑功能,能将图形自动转化为G代码文本,手动修改。 (8) 导入背景图片并进行自由移动,可自由调整图片大小。 (9) 视图切换功能,可以自由切换视图显示XY、XZ、YZ三种。 (10) 匀速扫描实时显示合成速度,各轴位置曲线的变化。 (11) 导出采集点的坐标及状态、时间等信息。 (12) 保存当前视图显示图形为bmp图片。 (13) 输入参数自动生成三维矩阵。 3系统介绍 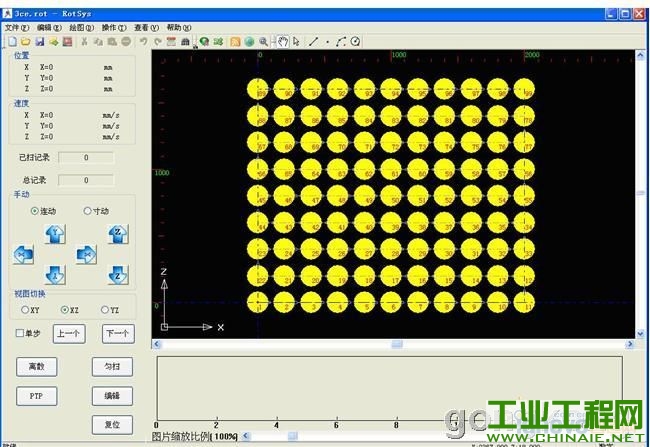 运动中界面: 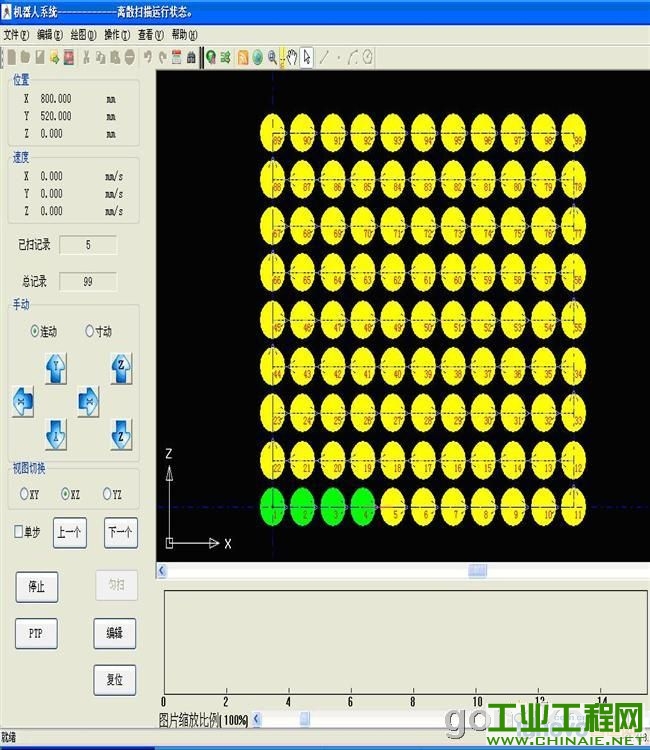 3.1 界面介绍 3.1.1 图形编辑区: 可绘制点、线、3点弧、起终点半径弧、3点圆、圆心半径圆等;通过图形属性修改相关特性,也可选中图形进行拉伸、移动等操作;支持复制、粘贴、删除、剪切、查找等操作。 3.1.2 显示控制区: 实时显示各轴位置、速度、已扫记录、总记录等信息。 手动控制 实时显示XYZ轴位置,实时速度,当前运动的记录序号,总记录号。  手动控制各轴运动方式分为两种:连动,按钮对应轴运动,抬起运动停止;寸动,按钮按下后对应轴移动设置步长距离。 3.1.3基本控制 视图切换选择:XY、XZ、YZ三种。 单步:进行离散扫描时点击此复选框出现“√单步”,运动一个点后自动停留,再按“F7”键运动到下一点。 下一个:离散扫描运动中执行暂停后点此按钮(或按F7键)继续运动,单步停止后点此按钮执行下一个。 上一个:离散扫描运动中执行单步停止后点此按钮(或按F6键)执行上一个。 离散:当数据为多个点时,可执行此功能。与单步配合使用,不选用单步时,自动移到各地位置并停留一段时间后移到下一点。点击此功能后出现如下对话框,进行从头开始或某一记录开始。点取消退出此操作。 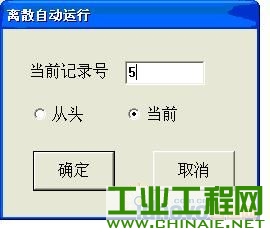 匀扫:数据为一个直线或弧或圆时,选择此功能。可匀速行走并20ms采集一次坐标数据。 停止:无论什么运动,点击停止按钮或按F9键即可减速停止。(运动时“离散”按钮变为“停止”按钮) 暂停:离散扫描运动中按Esc键可暂停各轴移动(快捷键,无对应按钮)。 PTP:点到点运动控制,单击后出现以下对话框,可进行相对运动,也可进行绝对运动。  相对运动:输入偏移值,点确定后,各轴移动到当前位置+偏移距离点。如:当前位置为(X100,Y100,Z100),输入X偏移20 Y偏移-30,则移动到位置点(120,70,100)。 绝对运动:直接输入三轴坐标值,按确定后移动到设定位置点。如:当前位置为(X100,Y100,Z100),输入坐标点(120,70,100),则移动到位置点(120,70,100)。 复位:执行机器人找原点功能,一般刚进入软件或故障发生后执行此功能。 编辑:点击此按钮后显示一可编辑文本对话框,各点、线、弧、圆均可进行G代码编辑。 3.1.4 速度显示区: 进行匀速扫描时,在此位置显示速度与时间、位置与时间曲线图。横坐标单位为秒,纵坐标为速度、X轴位置、Y轴位置、Z轴位置曲线。红色为合成速度,绿色为X轴位置,蓝色为Y轴位置,黄色为Z轴位置。 图片缩放比例(百分比0~1000):导入背景图片后,拖动滚动条背景图片进行缩放。 3.2 菜单介绍 文件:新建,打开,保存,另存为,退出。 编辑:剪切,复制,粘贴,删除,撤消,重做,全选,查找,筛选。 绘图:导航,选择,点,线,3点圆弧,起终点半径圆弧,3点圆,圆心半径圆。 工具:系统参数,背景移动,PTP运动,文本编辑,复位,离散,匀速,绕路设置,数据列表,保存位图,整体偏移,多探头设置,矩阵功能。 查看:适应窗口,适应图形,区域放大,比例系数。 3.3 右键菜单 (1)选中一个点后再右击弹出菜单: 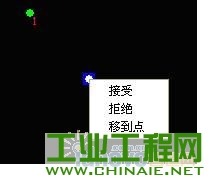 接受:选择后点变为绿色,代表已经测试过。 拒绝:选择后点变为红色,代表未确认测试结果。 移到点:选择后机器人移到选择点位置。 (2)选中一个线、弧、圆后再右击弹出菜单: 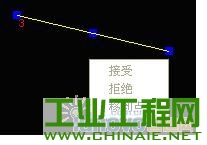 移到点:选择后机器人移到选择图形的起点位置。 (3)选中多余一个图形或不选择图形后弹出菜单:剪切、复制、粘贴、绕路。功能同前面介绍的内容。 4 结束语 此系统已成功应用,并且各项指标达到或超过客户要求,XYZ轴重复定位精度±0.01mm,定位精度为±0.03mm,机器运行平稳。软件开发的功能超过客户需要,实现了快速方便操作,运动路径合乎要求,位置采集准确,采集频率高。此系统丰富的图形,文本编辑功能可应用于数控机床中。 |

 /2
/2 






