|
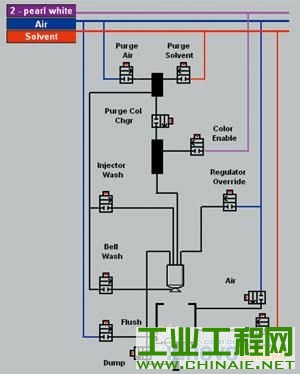 图1 换色、清洗系统结构 本文以FANUC喷涂机器人P200E配用Sames公司PPH607雾化器为例,讨论机器人在喷涂过程中产生的清洗后溅溶剂质量问题,通过分析问题产生的现象、原因,根据机器人换色系统构成,提出一些关于这些质量问题的解决措施。 P200E机器人的换色、清洗系统的结构如图1所示,主要用到的清洗/换色程序有:Cap Clean(旋杯清洗)、Push Out(推出)、Clean Out(洁净)和Fill(填充)。 Cap Clean:将雾化器送到雾化器清洗盒,将气体和溶剂喷到雾化器表面的外部部分,除去残留在雾化器表面的涂料。该操作包含旋杯冲洗阀门和喷咀冲洗阀门。BWP旋杯冲洗阀门用于清理旋杯的外表面,IWP喷咀冲洗阀门用于清理旋杯的内表面。 Push Out:在更换颜色之前使用,为的是利用涂料供应管路中所有剩余的涂料,将其提供给雾化器。关闭换色阀,接通净化气体阀门。利用换色阀总管和总管路中剩余的涂料,继续完成喷涂仿形路径。典型情况下,Push Out是在更改涂料颜色之前进行的,使涂敷系统基本清空。 Clean Out:净化气体和净化溶剂以交替方式循环通过换色阀总管、涂敷管线和雾化器,清洗盒内部,防止前面颜色的涂料污染其他颜色的涂料。同时还启用了RO调节器覆盖功能,用于将雾化器流量调节器维持在全开状态。 Fill:当系统空且干净时,该程序用于装填颜色阀门总管涂料供应管线(为雾化器提供涂料),并为雾化器提供所请求颜色的涂料。打开相应的颜色换色阀,接通触发器阀门,并启用RO调节器覆盖功能。典型情况下,当雾化器位于清理盒时,将执行装填循环,这是因为,使用底漆功能,能够使从雾化器排出的涂料量降至最低。在此时,可以为雾化器倾卸阀门加电或不加电,提供平行路径,允许涂料供应系统中的气体轻松地排出。 关于清洗后溅溶剂 1.机器人的清洗过程 中涂机器人设定为喷涂6辆车后,执行一次Cap Clean程序动作,如图2所示: (1)机器人执行移动去清洗盒位置的动作,时间0.1s。 (2)机器人到清洗盒位置后打开ACSP、PSP和BWP阀门,即打开溶剂阀门清洗雾化器表面和旋杯的外侧,时间0.2s。 (3)、(4)机器人在清洗和位置不动,打开ACAP、PAP和BWP阀门,打开压缩空气阀门吹干雾化器表面和旋杯外侧的溶剂,时间共0.8s。 (5)维持3、4步的动作,打开ACDP阀门,清洗盒向雾化器吹出压缩空气,时间1.8s。 (6)机器人开始移动退出清洗盒,关闭了ACAP,打开了PAP、BWP和ACDP阀,继续吹干雾化器表面和旋杯外侧的溶剂,时间2s。 (7)持续第6步动作,直到2s后结束程序。 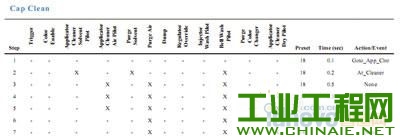 图2 Cap Clean步骤 2.溅溶剂的原因分析 从以上Cap Clean程序动作分析,它只是在步骤2的时候打开了溶剂阀门0.2s的溶剂清洗时间,之后的时间都是使用压缩空气吹干的动作,这应该是比较完善可行的程序了。但它在实际使用的时候,程序执行到步骤6机器人离开清洗盒,这时会有溶剂从清洗盒内冲出飞溅到雾化器的表面,这些溶剂在机器人喷涂的过程中滴落在车身表面造成了溅溶剂的质量问题。 根据清洗盒结构,我们把清洗盒的每个元件都做了仔细的检测,对机器人使用的溶剂和压缩空气的压力参数也做了修改。虽然经过这些检测和修改溅溶剂的问题有些改善,但还是存在。 通过以上分析、测试,最有可能储存溶剂的地方是清洗盒上的清洗环内部。当Cap Clean程序运行时,控制溶剂阀ACSP、PSP开启,喷出的溶剂弥漫在整个清洗盒中,在溶剂阀关闭后还有溶剂残留在输送管路内,它们还会在之后开启的ACAP、PAP空气阀门的压缩空气的作用下继续喷出,这些溶剂在压力的作用下进入到清洗盒内的每个缝隙。在整个清洗盒的结构中清洗环是最有可能藏纳溶剂的地方,它的密封圈因经常受机器人雾化器的挤压处于运动状态,不能起到一个完全密封的做用,溶剂通过密封不良的密封圈进入了清洗环内部的腔体。当Cap Clean程序运行到第6步骤,机器人雾化器从清洗盒上抬起,并开启ACDP阀从清洗环吹出压缩空气,也吹出了渗入清洗环中的溶剂,这些溶剂从清洗盒出口飞溅到了雾化器表面。 3.解决方案 对现有的清洗环进行改造,使用密封性更好的清洗环可以解决这个问题。但要考虑如何在不增加成本的情况下解决溅溶剂的难题。经过分析发现,可以通过修改Cap Clean程序解决,当开启溶剂阀的时候,也同时开启ACDP清洗环压缩空气阀。这样清洗环的内腔中充满了压缩空气,溶剂也就不能进入到清洗环中储存,也就没有溶剂飞溅到雾化器上,这样达到解决机器人清洗后溅溶剂的问题。 基于这个原理对Cap Clean程序进行修改。改进后的程序很好地解决了溅溶剂的问题,并把清洗程序的工作Cap Clean时间由原来的6.9s变为4.9s。这个时间的缩短也同时解决了机器人经常报的换色等待故障。 结语 在解决机器人清洗后溅溶剂问题的过程中,我们收获的不仅是Cap Clean程序,我们还对机器人的结构、控制方法和工艺参数设置有了更细致的了解。 |

 /2
/2 






