|
机器人的使用可以挖掘出更大节约的潜能。目前正在开发适用于小批量生产的机器人。通过示范案例可以实现快速和直观地为机器人编程。这种编程方式也可以应用到自动碳纤(CFK)编织过程中。这样不仅可以明显地减少编程时间,还可以大大提高其经济性。 碳纤维复合材料是一种新型的非金属材料,具有高比强、高比模、耐疲劳、抗蠕变、耐高温、耐腐蚀、耐磨损、尺寸稳定、导电、导热、热膨胀系数小、自润滑和吸能抗振等一系列优异性能。 碳纤维复合材料的另一重要特性就是比重小。比重一般在1.6左右,是铝的1/2、钢的1/5。碳纤维复合材料的强度很高,有很高的“比强度”(比强度=材料的强度极限/材料的单位重),它的比强度是钢的5倍,刚性非常好。 由于碳纤维复合材料的优质材料特性,在负荷极高的情况下,已经有越来越多的构件都是使用纤维复合材料制作而成。如飞机的龙骨、管道和车辆的框架型材。制造的方法是,引导一个核心,也就是构件的正极,穿过一台装有干碳纤维带的径向编织机,然后将产生的预成型件(预制件)在后面的工序中用树脂浸润渗透。 为了将整套的核心穿过编织机,可以使用工业机器人,如图1和图2所示。采用工业机器人的优点是,由于工业机器人可以拉着预成型件穿过编织机,从而可以使工件的质量得到大幅提升,并能够降低加工的成本。 不过由于成本的原因,只有在大批量生产时,使用工业机器人才更为合算;不过即便是在大批量生产的情况下,机器人的编程也仅仅只占整个批量总加工时间的一小部分。还有另外一个需要注意的问题是,机器人编程并不容易,需要编程人员具备很高的资质,只有具备非常熟悉复杂编程环境的技术工程人员才能使工业机器人得到充分的发挥。 为了能够使小批量生产的中小型企业也能分享到使用工业机器人带来节约的好处,Fraunhofer IPA研究所开发了通过示范案例来达到快速和直观的编程环境。 人工移动机器人很简单,我们只需要最简单的接触动作,也就是拉或者推,就可以移动机器人的位置。我们把这个过程和它走过的轨迹拍摄下来,然后进行重放分析,再加上用传感器采集到的工人的力和力矩进行换算,就可以模仿工人的动作,然后再通过生产厂家专用的接口传输到工业机器人上。
 图1 机器人和滚动扰流片的芯棒(左)、机器人和制成的构件(右)
 图2 斯图加特大学IFB飞机制造研究所采用操作机器人的径向编织机 如图3所示,在基于模块式结构的部件集成在编程环境里,除了力与力矩传感器外,引导工业机器人最重要的互动部件是一个图形显示的用户界面。操作人员可以通过这个用户界面指挥机器人,也可以在位置、方向和输出端的开关状态方面对轨道加以调整,还可以通过这个用户界面对速度图形给出定义。附加的组件有手持控制器,手持控制器通过无线网可以集成到系统里,或者也可以是一个语音控制器,用来设置系统的状态和速度。
 图3 开发成功的编程环境的组成部分 由于用手动不可能百分之百精确地控制需要运行的轨道,因而轨道必须能够在事后再进行加工,这也要用到图形界面,工人可以用这个界面进行各种类型的再加工工作。通过压缩和转换成直线或齿形曲线对轨道进行平整;对轨道点的位置和方向进行调整;根据轨道位置设置输出端。 经过简单的学习之后,所有的功能都可以用鼠标实现。用图形表示的仿真可以对所做的修改进行检查。 同粘贴技术和焊接技术中的用途相反,编织核轨道编程不需要所有维度(自由度)都运动。为了得到最佳的位置结构,我们希望编织点上只有一个与编织机成轴向的动作,因此编织核必须一直处于中心位置。图4是专门按这些特性调整好的运动方案。
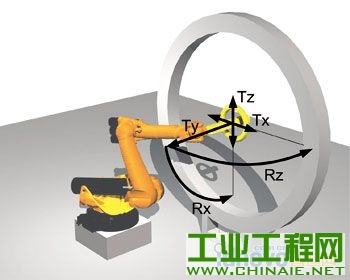 图4 简化的动作控制:两个旋转轴,两个校正方向 程序员通过力-转矩-传感器来控制Rx和Rz的旋转,Ty的运行动作是自动进行的,通过触摸屏可以对Tx和Tz的运动进行校正。 斯图加特大学飞机制造研究所IFB和Fraunhofer生产技术的自动化研究所IPA进行了合作,对In-Teach编程环境做了日常适用性的实际测试。IFB接受的小批量生产为节省时间的使用编程环境提供了最佳条件。在制作复杂的弯曲组件时,通过示范为机器人编程实现了明显的节省时间的优点。一个新的组件大约需要30~90min就可以完成编程,而不是像从前那样需要长达几个小时才可以完成。通过力传感器、语音以及3D图像组成的直观操作接口界面,可以很快地熟悉工作过程。最后,在批量较小时,In-Teach编程环境也可以经济地实现自动化。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


