|
1吨重工件的车床上下料机器人 在大型卧车,大型龙门刨和大型加工中心等设备上料时,其毛坯件通常是几百公斤重,有的要上顿重。还有大型电机壳体,减速机壳体,发动机壳体等的搬运也很费时,费力。无论是机加工上下料,侵漆,清洗等工序间搬运都是非常费时,费力,这直接影响了工作效率。这类大型零部件的搬运在欧美早已采用大型龙门式机器人来搬运。几年前我公司为一德国企业设计加工了一台350公斤重零件侵漆机器人,运行一直平稳高效,用户对此比较满意。我公司还给其它企业设计了 500公斤重钢轴上下料(卧车)机器人。结合德国百格拉公司机器人的实际经验和指导我们可以设计建造重达5000公斤重工件的搬运机器人。本文以500公斤重钢轴上下料(卧车)机器人为例来介绍,其它负载重量搬运机器人的设计相似. 一 机器人结构说明 1其本要求 钢轴重约500kg,长约2000mm, 放置在卧车后面的料架上。要求机器手把料架上的钢轴抓起来,放置在前面卧车的两个支撑架上,把加工完的钢轴抓起来,放在车床前面的放料架上。为此选择一个水平运动轴(X轴)和上下运动轴(Z轴)的二维XZ机器人。根据两个料架高度,车床中心高度及他们间前后距离要求机器手的有效行程为 6000*1000mm。图1是机器人及车床的示意图。 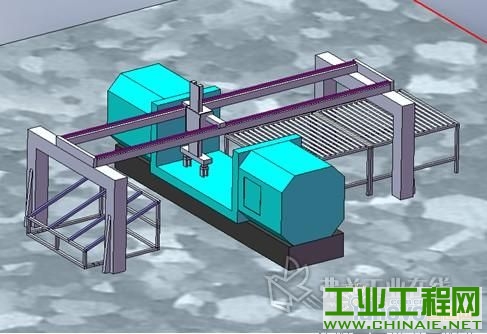 运行速度:Z轴平均速度为每分钟20米,最高运行速度为每分钟30米。X轴平均速度为每分钟30米,最高运行速度为每分钟35米。 2 机器人整体结构 图1是XZ二维机器人结构示意图,本机器人的设计在借鉴了三家德国大负载机器人和西班牙一公司专用钢轴上下料机器人基础上给出的设计方案之一。 Z轴结构: Z轴采用双100*100*6mm双钢柱结构。两个钢柱间距是600mm, 用铝板连接起来形成一个,120*800mm(宽度*长度)的加强型结构。其有效行程可以按要求在600~1600mm可选。Z轴采用双直线导轨结构及单齿轮齿条传动方法。 X轴结构: X轴采用双梁结构(类同天吊的横梁)。每根梁采用横截面为200*200*8mm(宽度*长度*臂厚)的加强型横梁结构。其有效行程可以按要求在6000~12000mm可选。X轴采用双直线导轨结构及双边齿轮齿条同步传动方法。 这里X轴和Z轴均采用进口高速大负载直线运动导轨和高速大负载齿轮齿条运动传动结构。 3 机器人支架结构 整体支架采用龙门式,两根立柱计划采用300*300*10mm。两根立柱采用地脚可调结构来进行垂直度的调整。两根立柱间距要看现场上下料要求来定。 4 上料架说明: 由于要加工的工件是钢轴,其尺寸大约为2300*200mm, 重达500公斤,所有或采用天吊和插车类搬运到上料架上,或采用传送带运输。这里按采用传送带运输方式考虑,要求钢轴滚动到最后有挡位处,保证钢轴与车床卡盘轴心平行。钢轴在传送带的最后位置可以有小的左右位置误差,但要很小。这样机器手抓取钢轴,提升(Z轴),水平运动(X轴)到车床卡盘轴心上方后,Z 轴再下降直到车床上两个支撑轴上。 5 下料架说明: 下料架与用户对加工完的钢轴运输方式有关,我们这里假设采用钢轴靠自身重力滚动传送方式。机器人抓取钢轴后,提升(Z轴)到一定高度后,水平运动(X轴)到下料架上方后,Z轴再下降直到钢轴放到下料架上。 6 手爪说明 手爪选用德国Sommer-Automation 公司的,它为欧洲很多家提供各种专用手爪。我们采取与欧洲企业所用相同的火车钢轴抓取手爪,保证技术上成熟,使用稳定可靠。 7 直线导轨选型 我们选择日本THK公司高速导轨。这里X轴和Z轴都选择SHS45LV型号,单个滑块时导轨的最大动态载荷为10000GK, 当两个滑块刚性连接时其最大动态载荷为50000GK。本项目每根高速导轨上采用四个滑块,并刚性连接。这样两根SHS45LV型号导轨及八个滑块完全能胜任最大动态载荷为1000公斤负载时的高速运动,高速加速和减速。 单导轨双滑块紧靠一起时:Ma = 16.3kN.m,Mb = 16.3kN.m,Mc = 3.53kN.m(单滑块数据), 当采用四滑块紧靠一起时:Ma,Mb和Mc都会增大5~6倍。 8 齿轮齿条选择: 初步选择模数是4,宽度和高度大约50*40mm的齿条。 二 运动控制系统 1)数控系统 选择西门子PLC,保证高可靠性,保证长期稳定可靠工作。 2)驱动电机 Z轴驱动电机: Z轴采用额定转速2000转,额定出力25Nm的交流伺服电机,5.3千瓦交流伺服电机,最大出力62Nm(3秒内), Z轴最高运行速度为每分钟30米,平均运行速度为每分钟20米,加速度为每秒0.5米,负载/驱动电机转动惯量比小于2, 所配减速机为德国NEUGART 公司PLN 142/20 正常上升减速机出力要求为312Nm, 而PLN 142/20实际最大出力为1187Nm, 最高转速为每分2273转时,驱动电机最大出力是62Nm, 安全系数为280%。 Z轴要选带自动抱闸的伺服电机。 X轴驱动电机: X轴采用额定转速3000转,额定出力5Nm的交流伺服电机,1.6千瓦交流伺服电机,最大出力12.6Nm(3秒内), X轴最高运行速度为每分钟31米,平均运行速度为每分钟30米,加速度为每秒1.05米,负载/驱动电机转动惯量比小于2, 所配减速机为德国NEUGART 公司PLE 120/20 正常运动减速机出力要求为70Nm, 而PLE 120/20实际最大出力为252Nm, 最高转速为每分2400转,驱动电机最大出力:12.6Nm, 安全系数为260%。 X轴采用两个完全一样的伺服电机和行星减速机。 3 所配行星减速机 Z轴所配行星减速机 所配行星减速机采用德国NEUGART公司PLN142/20。该减速机减速比是20, 额定输出扭矩为910Nm,最大输出扭矩为1920Nm,效率是95%,反向间隙小于5弧分。 X轴所配行星减速机 所配行星减速机采用德国NEUGART公司PLE 120/20。该减速机减速比是20, 额定输出扭矩为260Nm,最大输出扭矩为520Nm,效率是94%,反向间隙小于12弧分。 X轴采用两个完全一样的行星减速机。 三 运动过程 1 上料过程 首先X轴运动到上料架上方,等待上料架上钢轴到位信号后手爪张开。检测到两个手爪都完全张开后Z轴下降到特定高度。这是钢轴应处于手爪中,检测到两个手爪内部都有钢轴后,手爪闭合。检测到两个手爪都闭合后,Z轴提升到指定的高度,然后检测Z轴到位信号(以防钢轴撞上机床)。检测到Z轴升高到位信号后,X轴向机床的卡盘正上方运动后停止运动,然后检测X轴到位信号。检测到X轴到位信号后,Z轴向下运动到指定的高度后停止运动,这时钢轴的轴心与机床卡盘轴心同心,然后检测Z轴到位信号。 检测到Z轴到位信号后,手爪张开,钢轴放到车床的两个支撑架上。检测到手爪张开信号后,Z轴升起到指定高度,机床主轴启动,开始加工。 上料时间大约20秒,这里是按运行速度估计的时间,要根据机床具体高度,上料架高度和位置才能准确计算上料时间。 2 下料过程 在得到机床加工完,主轴已停止转动后,Z轴开始下降同时手爪张开。检测到Z轴下降到特定高度及两个手爪内部都有钢轴后,手爪闭合。检测到两个手爪都闭合后, Z轴提升到指定的高度。检测到Z轴升高到位信号后,X轴向下料架上方运动。检测到X轴到位信号后,Z轴向下运动到指定的高度后停止运动,然后检测钢轴是否已放到下料架上。检测到钢轴确实已放到下料架上后,手爪张开。检测到手爪张开信号后,Z轴开始升高到指定高度及检查Z轴到位信号。检测到Z轴升高到位信号后,X轴开始向上料架方向运动到指定位置,开始抓取一个钢轴,去完成上料过程。 下料时间大约20秒,这里是按运行速度估计的时间,要根据机床具体高度,下料架高度和位置才能准确计算下料时间。 四 结论 由于直角坐标机器人非常适合各种机床上下料应用,在欧洲很多国家,机床上下料早已经大量使用。我公司代理的德国百格拉公司Berger Lahr直角坐标机器人在欧洲享有盛誉,我们可以依据德国公司的成功经验和案例,及我们10多年的应用经验为用户设计高效高速高可靠的专用搬运机器人。 |

 /2
/2 






