|
组织是系统内部的一种有序结构,是系统动作的规则。控制系统内部组织的形成有他组织和自组织两种方式。他组织指的足通过指令编程,将动作逻辑固化在系统内部,系统按照这种同定的逻辑结构运行。自组织指的是系统内部有很多子系统,这些子系统之间具有一定的联系和规则,并根据外部参量输入及其所蕴含的信息相互协调工作而形成一定的功能有序结构。工业机器人作为一个独立的实体结构,也需要用其中的一种方法时软件控制系统进行配置。如何让用户通过一个人机界面进行简单的参数设置,就可以实现机器人控制逻辑结构的重新组合,以匹配最新的工作需求,这就是采取自组织方法设计控制系统的最大特点,也是文中所研究的一个重点。 按照自组织的这种功能要求,结合Agent理论所提出的模块化、模块与模块之间可随意组合的功能特点,针对当前工业机器人在工业中的普遍应用,文中设计了一种新型的基于Agent原理,可以根据上位机用户输入,下位机能协同工作,自动形成用户控制逻辑的四轴工业机器人可重构控制系统。该控制系统更加柔性化,底层部件中的各个动作功能模块可根据变化的内部控制信息流或外部环境感知流进行重新配置和组合,将这种方法用于工业机器人控制系统的设计,具有广泛的应用市场和发展前景。 1 控制系统设计框架 文中研究的多轴工业机械手以PLC控制为中心,并且要求PLC程序能根据上位机下传的参量自动莺新组织动作逻辑,而不是重新编写程序。这要求下位机程序能把这些参最分析、分解成各个子任务,并将任务细化到每个动作颗粒,然后根据Agent智能体原理,通过调用各个动作Agent来执行目标动作。最后,控制系统对各个Agent智能体进行组合,实现新的动作逻辑结构的形成。按照上述的系统设计思想和Agent智能体的功能属性,对系统的总体结构进行了配置,如图1所示。
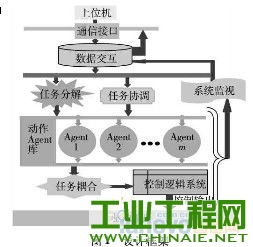 图1设计框架 2 硬件系统 文中的4自由度伺服驱动可白重组机器人控制系统分为上位机和下位机两大部分。上位机是计算机,下位机主要由三菱的PLc和伺服系统构成,上、下位机通过485总线通信。搭建的硬件系统如图2所示。该机械手的4个自由度需要由4个电机驱动,而一个PLc最多能带动两个伺服驱动系统,因此为下位机配备两台PLC来控制4个伺服系统。为了能构成1:N通信线路,实现一台计算机控制两台PLC,选用相对简单、可靠而又低成本的485通信方式。由于计算机主机上安装的是Rs232串口,所以在计算机主机上加上RS232/RS485的适配器进行通信协议的转换。
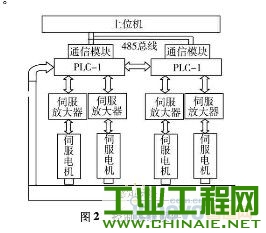 图2控制系统硬件 由于下位机逻辑结构自重组要求,每个动作功能模块之间有着相应的逻辑和规则,而这些动作由两个PLC控制模块实现。因此,PLC与PLC之间也有通信;485总线在同一时刻不能有两帧数据在传输,故它们之间不允许占用总线进行通信。考虑到它们之间只有简单的开关量通信,而且通信的时机是分开的,故可以通过它们的I/O口实现两台PLC模块的社交功能。另外,为了确保机器人动作的准确性,驱动部分采用具有闭环控制功能的伺服系统。控制器通过通信模块接收来自上位机的动作参量,并对参量数据进行分析,经过具有控制逻辑自重组功能的算法进行耦合,最后通过伺服驱动系统输出动作。 3 基于Agent的软件系统 3.1 下位机 下位机软件系统设计的目的主要有3个:(1)实现与上位机的通信和数据分析,把隐含在通信数据中的机械手控制逻辑结构信息表达成下位机能识别和处理的形式,即任务分解;(2)将分解出的每个任务数据包传递给对应的任务模块,通过调用对应模块实现动作的输出,即子任务调用及其执行;(3)通过模块之间的协同工作,把分解出的各个子任务还原成上位机下传的整体控制逻辑结构,即任务耦合。按照这3个目标,设计了下面3个Agent。 3.1.1 任务分解Agent 分析动作参量矩阵,为每个动作Agent的知识层提供动作决策依据,参数,动作个数m,及社交决策依据等。任务分解过程就是利用Agent智能体根据通信数据分析准则向机械手释放任务的过程。
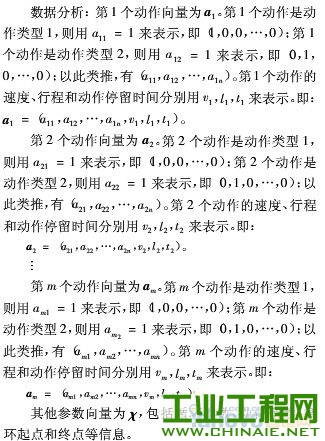 从上位机传人至下位机的动作逻辑数据流信息可以表示成以下形式的动作参量矩阵:
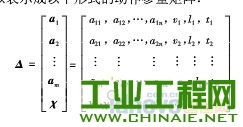 任务分解:PLC收到这些数据流后,以行为单位,将每行的前n项以十六进制的形式赋值给连续的几个辅助继电器M。实现将对应的动作标志继电器M置ON和置OFF;之后,控制算法依次根据这些辅助继电器的状态从动作库中为每个动作选择动作类型。把每行向量中的动作参数赋值给对应每个动作的参数寄存器D,后面在执行动作时就会从该寄存器中取值,并输出动作。 3.1.2 子任务调用与执行Agent 子任务调用与执行Agent的作用模式:从图3可以看出,一个动作执行Agent的作用模式分为子任务接受、分析、执行3个过程。在接受任务时必须有一个使能信号,以激活Agent智能体,使其发生作用。Agent被激活后,在Agent内部必须能够分析将要执行的动作类型,依据所处环境的变化对动作决策的影响及Agent之间的通信等。经过对环境、任务等的分析,最终输出动作,在输出动作过程中Agent始终会根据周围环境的变化改变动作策略。以下就是系统中的动作执行Agent对其环境的作用形式图。
 图3 任务执行Agent作用模式 任务执行Agent结构模型:图4是控制系统所采用的动作执行Agent模型,该模型主要由感知层、知识层、执行层、社交层等4部分组成。
 图4 任务执行Agent结构模式 感知层,也称作接口层,是接受外界信息的窗口。这个信息可以是来自系统外部的,如传感器、开关、按钮,脉冲输出完毕信号等,也可以是来自系统内部其他Agent的社交信息,如控制逻辑中,上一个任务执行Agent结束后根据任务耦合原理自动激活下一个任务Agent。其中必定有一个信息是激活信号,Agent被激活后,其第2层即产生作用,这个层叫知识层。 知识层,是Agent智能体的专家库,是存放一系列规则的地方,如接收、判断感知层状态的知识,动作决策知识,参数选择知识,社交决策知识等。知识层随时会改变动作决策,但在没有改变动作决策前,会为执行层选择目标动作类型,输出参数等目标任务元素。在知识层中主要有处理传感器信号的IF...THEN规则和处理目标动作的IF...THEN,例如:手爪动作模块中,在规定时间内,手爪汽缸的一对伸缩动作传感器信号未发生切换,则该模块立即向系统输出报警信号,并在对应断电保持寄存器中记录对应的故障信息待测控软件查询;伺服动作模块中,若没有捕捉到气压不正常等危险信号,则继续保持伺服输出的目标动作策略,若有危险信号,则立即停止目标动作策略,并与报警模块社交。 执行层,最终会执行知识层输出的任务动作,一个是Agent的目标动作,另外一个是紧急处理动作。在工业机器人中,有脉冲输出指令序列,开关重置ON/OFF指令序列等执行指令模块。 社交层,处理Agent与Agent之间的通信任务,主要和另一Agent的感知层链接。例如:在伺服模块中扫描到危险信号时,伺服模块自动无效,同时激活报警模块的过程运用到社交层的功能。 3.1.3 任务耦合Agent 图5是本控制系统采用的任务耦合Agent总模型。任务耦合的过程,就是根据任务分解Agent的输出来调用各个任务执行Agent智能体模块,再由任务耦合Agent的协同机制来组合被调用的各个任务执行Agent模块,形成隐含在参量矩阵中的控制逻辑结构。例如:任务耦合Agent根据上位机下传的参量矩阵的行数确定动作总数m,根据每行前几列中数值为1的项所在列数确定该动作的类型。每完成一个动作,断电保持寄存器D自动加1,并与动作总数m比较以决定是否继续做下一个动作,最后一个完成后,循环次数寄存器D自动加1,并与参量x。比较,以决定是否重新开始动作循环。
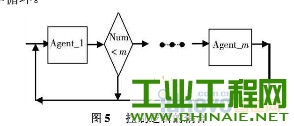 图5控制逻辑的耦合 3.2 上位机 上述系统动作参量全部是由上位机根据用户的设置传至下位机的。作为用户参量的输入界面,该上位机窗口里包含了下位机软件算法中所要求的所有参量项目,包括每个动作的动作名称,即动作种类amn、运动参数vm和lm、停留时间tm、动作个数m、循环次数X1、循环起点、循环终点等,如图6所示。
 图6人机界面 用户在界面上设置各个参数,通过485通信总线,将需要的动作参量矩阵作为参数的形式传人下位机中,PLC按照事先定好的上下位机协议,对数据进行分解分析,再通过根据自组思想和要求编写的梯形图对分解后的数据信息进行引导,形成用户所设定的逻辑组织结构。 4 调试与结论 按照文中提出的系统设计方法,在四轴工业机器人样机上进行控制系统的硬件、软件的安装调试工作。上位机通信方面,通过串口调试助手对用户参量数据的监视发现.所有的数据全部正确,均符合预先设定的通信协议的要求,且通信没有出现滞后和乱码。下位机方面,把监视到的正确数据通过串口调试助手下传至下位机后,下位机中各种动作模块能按照上位机设定的逻辑准确无误地组合,发生意外情况时对应的动作模块和报警均正确、快速地作出了反应。最后将上、下位机按照系统配置图正确连接,整个系统运行稳定,动作执行正确无误,实验数据和机器人动作状态均表明,下位机控制系统的各个功能模块成功地实现了脱离开发环境进行自由组合,具有很实用的面向用户的开发性。 这种新型的基于Agent原理、控制逻辑结构可重组的下位机控制系统设计方法,对于当前工业机器人的应用和发展具有重要意义,经过实际项目应用发现,该控制系统更加稳定和柔性化,特别在于它能提高逻辑编程工作的效率,节约开发时间,面向对象简单化等方面的优点。在接下来的研究工作中,抗干扰能力更强、速度更快的CAN总线通信方式将会代替485通信方式被应用到该机器人的控制系统中。在控制系统的设计方法方面,将深入研究Agent模块的设计方法.寻求更加优化的Agent模型结构,以节约程序占用的空间。另外,融入更多的可重构系统的实现技术,以在控制方式上寻求符合当前工业机器人应用的最佳匹配。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


