|
0 引言 现代工业生产中,弧焊机器人与变位机系统扮演了越来越重要的角色。目前,由焊接机器人和变位机组成的焊接工作站主要有两类:一类是非同步、工作站,另一类是同步工作站。对于非同步工作站,借助分度机可以将待焊工件转到几个特定的位置,然后由机器人分别对每一个特定位置的焊缝进行焊接。此类工作站中机器人和变位机之间的运动关系比较简单,机器人的示教和离线编程相对来说比较容易。对于一些复杂焊缝,要求机器人和变位机在焊接过程中协调运动。此时,机器人和变位机的各自由度之间存在着很强的耦合关系。 本文着重探索数控技术在弧焊机器人与变位机协调运动的应用,力求在弧焊机器人工作站中保证电弧电压、电弧电流、送丝速度、焊枪运行速度等参数的数字化匹配。 1 弧焊机器人与变位机的协调运动分析 1.1 弧焊机器人与变位机协调运动的意义 在比较规则的焊缝焊接过程中,弧焊机器人与变位机之间的运动相对比较简单。但是对于复杂曲线焊缝来说,往往待焊焊缝只有某一时刻的很短一段在比较理想的焊接位置。一般来说,熔化焊过程中使焊缝各个焊点的熔池始终处于水平或者稍微下坡状态是比较理想的位姿,这样得到的焊缝外观比较平滑、美观,焊缝质量相当好。为此,要实现比较理想的焊接姿态,就必须要求不断地将待焊点顺序地移动到各自的理想位置。在此过程中,机器人与变位机之间要有很精确的协调运动。 1.2 弧焊机器人与变位机的耦合与解耦 弧焊机器人与变位机的协调运动主要是指弧焊机器人与变位机之间运动的耦合与解耦。 如图1,设复杂焊缝MN在t时刻处于P位置,此时焊点M处于理想状态:经过At时间,焊缝运动到p’位置,焊点Ⅳ在Ⅳ,点处于理想状态。在这段时间内焊点M的轨迹为弧MM’,焊点Ⅳ的轨迹为弧NN’。焊枪要完成焊缝的焊接,既不可能仅仅沿焊缝MN运动,也不可能单纯沿MM’运动,它在空间的轨迹只能是两种运动的合成即空问曲线弧MN7。这样,通过运动合成明确了焊枪在空间的轨迹。还存在一个问题:焊枪在从M到N的过程中还有姿态约束,这一方面是为了保持焊枪和工件的相对姿态以满足焊接工艺的要求。另一方面也是为了避免焊枪和工件的碰撞。 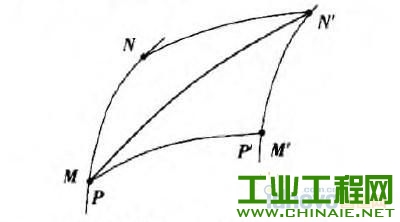 图1 机器人与变位机的藕合关系 2 弧焊机器人模块与变位机模块的研究 现代弧焊机器人系统一般包括弧焊机器人模块和变位机模块,对于这两个模块的研究直接关系到整个机器人系统的工作效能。下面分别就变位机模块和机器人模块做一些简单的探讨。 2.1焊接变位机的种类 目前。与机器人配套使用的焊接变位机有多重结构形式,比较常见的焊接变位机结构形式有:(1)固定式回转平台;(2)头架式变位机;(3)头尾架式变位机;(4)座式变位机;(5)L形变位机;(6)双头架式变位机:(7)双座式变位机;(8)组合式多轴变位机等8种类型。 焊接变位机的结构形式主要是为了便于完成复杂焊缝的焊接,要考虑到实际的经济效益。 2.2 数控技术在变位机研发和设计中的应用 数控技术及数控机床在当今机械制造业中起着重要地位。而现代数控机床是综合应用了计算机、自动控制、自动检测以及精密机械等高新技术的产物,继承了数控机床的优良性能,可以检查出代码的正确性,从而可以提高加工质量,减少出错率,加快编程速度。是典型的机电一体化产品,是完全新型的自动化机床;这显示了其在国家基础工业现代化的战略性作用,并已成为传统机械制造工业提升改造和实现自动化、柔性化、集成化生产的重要手段和标志。 焊接变位机是一种通用、高效的以实现环缝焊接为主的焊接设备。可配用氩弧焊机(填丝或不填丝)、熔化极气体保护焊机(C02/MAG/MIG焊机)、等离子焊机等焊机电源,并可与其它机组成自动焊接系统。该产品主要由旋转机头、变位机构以及控制器组成。旋转机头转速可调,具有独立调速电路。拨码开关直接预置焊缝长度。倾斜角度可根据需要调节,焊枪可气动升降。可见变位机也是一种现代的数控技术。而现代数控技术已经相当成熟,但是迄今为止我国尚未制定出焊接变位机的设计规程。利用成熟的数控机床设计规程可以对变位机的设计进行指导。数控机床的编程,设备控制。伺服驱动等与变位机相似。数控机床加持待加工工件与数控刀具的相对运动可以类比弧焊机器人持焊枪与变位机的相对运动。 2.3 多轴联动实现复杂曲线焊缝的焊接 数控机床最突出的优点是:可以根据编程,加工出较为复杂的曲线,比如圆、抛物线等。数控机床能加工出复杂的曲线。必须是多轴联动,现代数控机床往往是刀具固定在一个位置,工件做相对于刀具的运动。同样的道理,弧焊机器人与变位机之间。我们可以类比焊枪就是数控加工过程中的刀具,待焊焊缝就好比待加工工件。这样将会大大简化机器人模块和变位机模块。 由图2我们可以看到数控机床的刀具正在加工复杂曲面。在其工作过程中,数控刀具与待加T曲面之间必然有相互运动的耦合。而这种耦合是通过数控程序控制的,数控技术目前是非常成熟的。这对于机器人工作站的研发有很强的指导意义。  图2数控机床正在加工复杂曲面 2.4 弧焊机器人控制下焊枪的运动 现代工业机器人模块(图3),功能已经相当强大,能够加持焊枪多角度转动,与变位机之间的耦合也是非常容易实现。  图3 机器人模块头部的运动范围 机器人模块控制焊枪可以很大范围地运动,更加有助于实现与变位机的耦合与解耦。数控技术在焊接中的应用是随着国外进产品技术发展起来的。同时,国内焊接技术的发展也会促进数控技术在焊接中的应用。 3 数控技术控制弧焊机器人系统协调运动举例 如图4所示,一个椭圆形焊缝,如果变位机夹持待焊工件,应用数控技术中的宏程序编程即可轻松解决复杂焊缝的焊接问题。 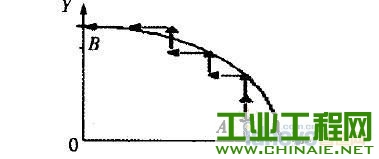
图4椭圆状焊缝 椭圆加工在数控技术中的编程思路:以一小段直线代替曲线,逐点趋近的方法来完成椭圆焊缝的焊接。 1/4椭圆焊缝轨迹线加工方法:已知椭圆的参数方程为 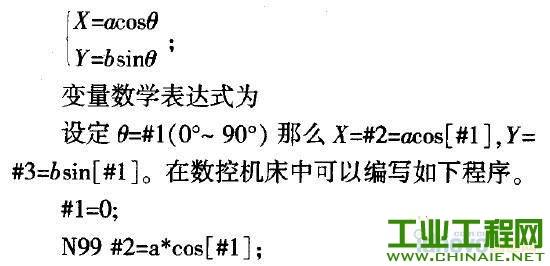 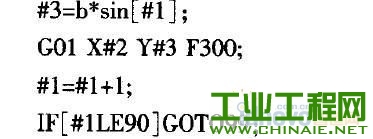 此程序可以在变位机相对静止的情况下,弧焊机器人完成椭圆曲线焊缝的焊接。 4 结论 综上所述,数控机床技术在变位机中的应用,更好地促进了弧焊机器人与变位机之间的运动协调关系。虽然我国尚未制定出焊接变位机的设计规程,但是成熟的数控机床设计规程可以作为指导,为现代工业生产大大节约了时间、空间,特别是在车辆、船舶制造方面,使得工作在不同制造单元之间的周转运输效率大大提高而成本费用不断降低。
| 






 /1
/1 


