|
1 引言(Introduction) 随着制造业水平的不断进步,激光切割和激光焊接技术已在产业界得到广泛应用,并在一些加工领域显示出明显的优越性。除激光切割和激光焊接外,激光表面工程、激光快速成型、激光微处理等技术亦日趋成熟,并逐渐应用于一些特殊的产业加工中。 目前激光加工机器人大多为两轴或三轴的机械手,只能进行简单的加工,而复杂曲面的加工则必须由高性能机器人来完成。针对此种现状,本课题研制了大范围、高精度5轴激光加工机器人,它可以完成复杂曲面的加工。该机器人系统具有如下特点:机器人本体采用高刚度框架式结构,平衡式设计,交流伺服驱动,高精度尽对码盘检测反馈。机器人控制器采用产业级嵌进式CPU,进一步进步控制器的运算能力,缩短控制周期,进步插补精度,保证机器人的检测精度和控制精度。建立了机器人误差模型,解决了机器人系统的误差补偿题目,实现了机器人的高精度加工。 2 总体设计方案(Schemedesign) 研制大范围、高精度5轴框架式机器人系统,既要保证系统的先进性,同时又要考虑实在用性和可靠性。由于机器人系统行程的加大,精度的大幅度进步,在机器人的基本结构形式、传动系统的配置方式、关键部件如一体化传动装置、交流伺服电机的选用等方面,均采取了诸多技术措施来达到性能指标的要求。同时对机器人的检测系统和机器人控制系统进行了特殊设计,保证了机器人整体系统的高精度和高性能。 2.1 特殊设计和技术措施 (1)Y轴传动采用双传动型,来减少由于Z轴的倾斜引起的误差; (2)腕部自由度的配置做了较大的改变,解决激光头与A轴同心度带来的误差,并加进了激光头姿态的调整功能; (3)X、Y梁采取了进步刚度的措施,Z梁立柱由2个增加至3个,以进步其刚度系数; (4)X轴、Z轴一体化传动装置的动力桥,采用加长形,由340mm长改为500mm长,进步装置的承载能力,减少变形的影响; (5)Y轴采用弃荷装置,以减小X轴一体化传动装置的负载,同时加大X轴驱动电机的功率; (6)增加了X轴、Y轴一体化传动装置的侧向直线度的整体功能,达到垂直方向的直线度由梁的平面度保证,侧向直线度由调整保证; (7)X梁、Y梁采用严格加工工艺,确保性能稳定和高精度:专做的特种钢管、公道的焊接工艺、人工时效处理、导轨磨床精加工等。 2.2 优化设计 在激光加工机器人的开发过程中,采用SolidEdge进行三维CAD设计,并通过有限元软件进行模拟分析,依据分析结果进行设计修改和优化。由于采用先进的设计手段,确保了机器人本体的优化设计,为进步机器人的整体精度奠定了基础。  图1 激光加工机器人外型图 3 关键部件的有限元分析(Finiteelementanalysisofkeyparts) 在激光加工机器人的设计过程中,对其关键部件x梁、y梁和z梁支架用软件进行了有限元模拟分析。模拟分析是按照梁在最大承载的位置进行计算,这样可以保证在任何位置都有较高的安全系数。 3.1 模拟分析过程 在模拟分析过程中,对x梁的简化最大,将三维模型转化成二维图形来分析,主要是由于x梁的结构比较简单而且规则,受力情况也比较简单。我们选择的单元类型是BEAM189,这种单元的精度比较高,另外,还引进了截面特性这个参数,所以,我们以为结果的正确性还是值得信任的。这样可以省掉复杂的建模过程,将主要精力用在结果的分析上。 对y梁的分析也采用了简化,但是采用了实体建模,y梁的结构相对比较复杂,而且受力也很复杂,采用的单元是SOLID45,单元的精度适中,考虑到y梁的长度,假如采用复杂的单元并细分网格,可能增加求解的困难,并延长计算的时间。在正确度和效率之间应该有一个公道的分配,采用三维实体模型就可以大大进步精度,所以在单元类型和网格划分的选择上,可以稍微粗糙一些,这样并不降低精度,并且能进步计算效率。 z梁支架是一个很关键的部件,所以,我们在尽量不简化的情况下对其进行了模拟,倒角、连接过渡和螺纹必须要简化掉,否则,这些部位可能增加相当多的单元数,增加计算量,甚至导致求解的失败。 3.2 模拟结果分析 3.2.1 x梁 x梁的模拟结果如图2所示,通过模拟的结果我们可以看出,在受力方向上,最大的应变是0.6×10-5m,这说明我们的变形是在答应的范围之内的。  图2 x梁在受力方向的应变分布 3.2.2 y梁 y梁的模拟结果如图3所示,通过模拟的结果可以看出,在受力方向上,y轴的最大变形是0.15×10-7m,完全能够满足实际工作中精度的要求。在受力方向上,y梁受到的应力最大也只有300N左右。  图3 y梁在受力方向的应变分布 3.2.3 z梁支架 z梁支架的模拟需要很具体,由于这个支架结构比较复杂,而且受力很大,它的变形直接影响到z梁的精度,所以,我们对其在各个方向的应力和应变都进行了分析。如图4、5、6所示为z梁支架在x、y、z3个方向的应变图。图7、8、9为z梁支架在x、y、z3个方向的应力图。  图4 z梁支架在x方向的应变分布  图5 z梁支架在y方向的应变分布  图6 z梁支架在z方向的应变分布  图7 z梁支架在x方向的应力分布  图8 z梁支架在y方向的应力分布  图9 z梁支架在z方向的应力分布 在图中,x方向跟x梁的方向是一致的,y方向即是y梁的方向,z方向是垂直向下的。在图4中,我们可以看到,在各个支撑板上,都承受了很大的应力,因而变形量也很大。而图5则说明由于z梁的作用力,使得固定z梁的板发生了变形,在模拟中,我们可以得到最大变形是0.2×10-8m,这样就保证了z梁的垂直度。图6是z梁支架在垂直方向即z方向上的变形,通过应变的分布可以看出,z梁固定板在z方向上的变形很小,而且比较相近,大约在0.2~0.7×10-9m左右,对垂直方向的尺寸精度影响很小。图7、8、9则是从应力方面来说明这个题目。 总之,从应力和应变两方面的分析结果来看,我们对z梁支架这个关键的零件的设计是公道的。 4 机器人误差模型(Roboterrormodel) 4.1 误差补偿方法 在进行机器人误差补偿及标定时,首先要考虑机器人的精度题目。在示教再现作业方式下,操纵者移动机器人末端执行器到指定位置,然后通过机器人控制器记录下此时末端执行器的位姿,通常就是电机的码盘值。然后,机器人可以“再现”已经记录的运动方式和编程顺序。在这种编程方式下,机器人的重复精度是主要的特性参数,现在大多数商品化产业机器人都是以这种方式工作,其重复精度在整个工作空间上都可以达到毫米数目级。因此,就精度题目来说,示教再现方式可以使机器人很好的工作。而对于激光加工机器人来说,它的工作方式不是采用示教再现方式,而是采用离线编程方式,这时机器人的尽对精度成为关键指标。一般而言,机器人的尽对精度要比重复精度低一到两个数目级,在如此低的精度下,机器人是无论如何也不能满足工作需要。造成这种情况的原因主要是机器人控制器根据机器人的运动学模型来确定机器人末端执行器的位置,而这个理论上的模型与实际机器人的物理模型存在一定误差。因此,对机器人运动学模型进行误差补偿进而进步机器人的尽对精度是目前机器人技术领域急需解决的题目。 一般情况下,机器人误差分为几何误差和非几何误差。其中几何误差包括杆件参数误差,理论参考坐标系与实际基准坐标系的误差、关节轴线的不平行度、零位偏差等;非几何因素包括关节和连杆的弹性形变、齿轮间隙、齿轮传动误差、热形变等。假如对机器人的几何误差进行了很好的补偿,尽对精度就可以大大进步,只有对于特定的需要进步尽对精度的应用时才考虑进行非几何误差的补偿。 要进步机器人的尽对精度,可以从两方面进手,一是采用“避免”误差的方法,即针对产生机器人误差的各种误差源,采用高精密加工手段加工机器人各零部件,结合高精密装配技术进行装配。二是采用综合补偿技术,即采用现代的丈量手段,对所测得的数据进行分析,辅以适当的补偿算法,对机器人的误差进行补偿以达到减小误差的目的。 由于激光加工机器人的精度要求很高,需要采用多种方法进行误差综合补偿。首先采用“避免”误差的方法。在机器人的结构设计中,采用公道的结构,使机器人的变形尽可能小。在加工制造过程中,关键的部件采用高精度的加工技术和装配工艺。但是该方法对机器人经过运行,产生由于机械磨损、元件性能降低以及构件自身动态特性等因素带来的误差则无能为力。其次通过综合补偿技术来进一步进步机器人精度。即根据实际丈量的机器人误差,在机器人模型中引进恰当的补偿算法,来减小机器人的误差,实现改善和进步机器人精度的目的。 4。2 机器人误差模型的建立 运动学模型的选择是决定机器人尽对精度的重要因素之一。它必须正确地对影响机器人末端位姿的各种因素建模。增加运动学模型的复杂度有助于进步机器人的尽对精度,但是也要付出降低机器人性能中其它特性的代价,因此建模时要综合考虑各方面的因素。 激光加工机器人为框架结构的机器人,我们以为采用网格化的误差补偿方法较合适,该方法可以补偿机器人几何误差和某些非几何误差。 根据机器人补偿精度的要求,可以把激光加工机器人工作空间划分为网格如图10所示。根据不同的补偿精度的要求,网格的疏密程度可以不同。实际的网格划分为14×11×9。 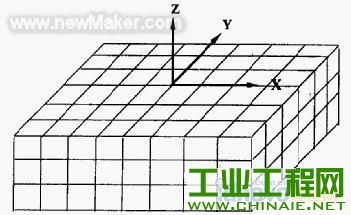 图 10 机器人工作空间网格划分图 X方向的误差补偿公式  Y方向的误差补偿公式  Z方向的误差补偿公式  其中 Li、Lj、Lk 分别为 X方向、Y方向和 Z方向的网 格点 ,Lxi、Lyj、Lzk分别为 X方向、Y方向和 Z方向的 位置补偿值 。 在机器人系统未补偿前 ,机器人系统的最大误差为 0.2mm,经过补偿后的机器人误差为 0.04mm,完全满足机器人激光加工精度的要求 。 5 结论 ( Conclusion) 目前激光加工机器人完成调试 ,运行结果表明系统完全达到预期指标 。该机器人预备用于汽车大型模具的表面激光处理 ,现在正在进行激光加工处理工艺实验 。不远的将来即可达到实用化程度 ,投进实际使用 。 |

 /2
/2 






